自作工程のメモとして
13.Dec.2017
![]() ADF4001発振モジュールで基準信号器を作る
ADF4001発振モジュールで基準信号器を作る
自作工程のメモとして
13.Dec.2017
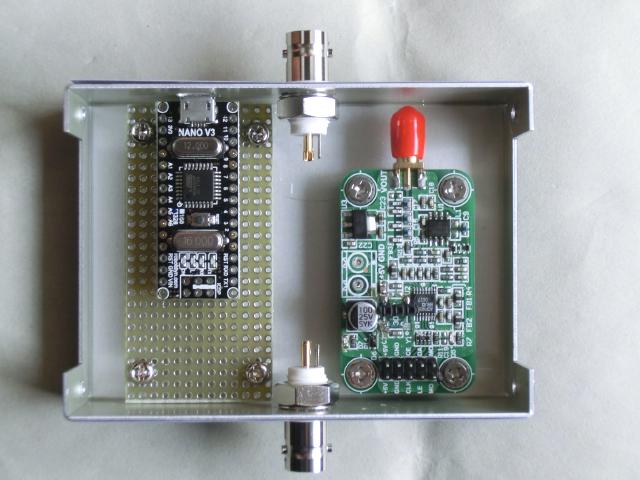
microUSBの穴は、ヤスリで削りすぎて大きくなっています。そのため表面にパウチで前後パネルシールを作り、開けすぎた穴をカバーしています。
最終設定周波数は、144.050MHzにセットしました。
Edit by bluegriffon3.0.1(フォント指定を入れています。)
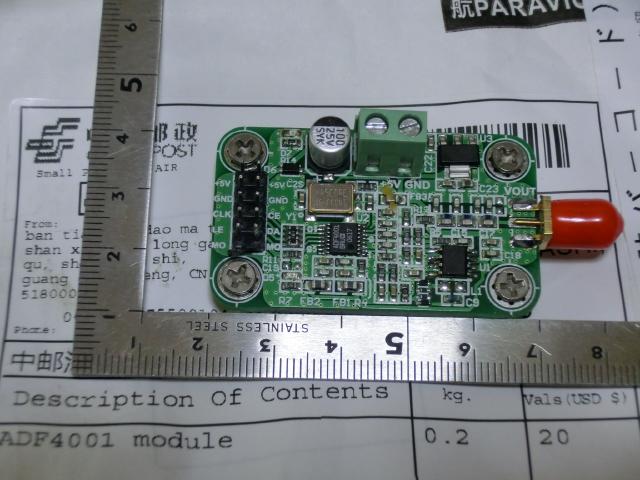
| 1.入手したADF4001基板 |
| 2.ADF4001モジュールの動作確認 |
Web上でそのまま動作させるようなスケッチを見つけることはできませんでしたが、日本語のデータシートを見ながらArduinoから信号線を4本出してそのまま制御すると、内部クリスタル(30MHz)を使ってそのまま発振させることができました。
■ 動作の仮実験
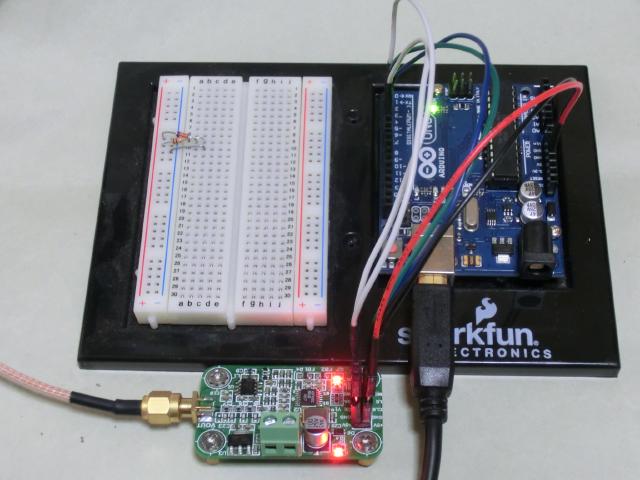
信号線(4本)のほか、5VとGの6本で制御できます。
動作確認後は、水晶発振器(30MHz)と電源用のネジこみターミナル(緑色)は外しました。
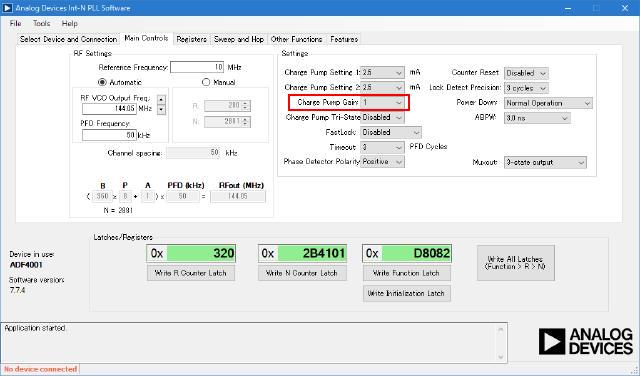
■ Analog Devices社のツール「ADI Pll Int-N」
VFO的(ただし20KHzステップ等)な動きの場合は、Arduinoで計算する必要が有りますが、簡易的な基準信号作りが目的のため、このツールだけで十分間に合っています。
■ 発振周波数指定の簡単なスケッチ
短いステップで簡単に動作してしまいました。
// Analog Devices ADF4001を使用するための簡単スケッチ
// "Arduino Nano, ATmega328P(Old Bootloader)"
// USB-SERIAL CH340(COM3)
// 目的周波数の設定は、「ADI Pll Int-N」 V7.7.4(Windows)ソフトで計算する。
// 元のリファレンス=30MHz
// 1.08KHz低い PtoP150mV
// スタートの設定
// Device :ADF4001
// -------------------------------
// RF VCO OUT : 116MHz
// PFD Frequency :200KHz (Min 20KHz)
// Reference Frequency:10MHz
// Write R Counter Latch :0xC8 // Reference Frequency:10MHz
// Write R Counter Latch :0x190 // Reference Frequency:20MHz
// Write R Counter Latch :0x258 // Reference Frequency:30MHz
// Write N Counter Latch :0x24401
// Write Function Latch & Write Initialization Latch :0xD8092
// -------------------------------
// 144.00MHz(PFD=200KHz REFf=10MHz) R_Latch = 0xC8; N_Latch = 0x22D001; InitLatch = 0xD8082;
// 144.02MHz(PFD=20KHz REFf=10MHz) R_Latch = 0x7D0; N_Latch = 0x3C2101; InitLatch = 0xD8082;
// 144.05MHz(PFD=50KHz REFf=10MHz) R_Latch = 0x320; N_Latch = 0x2B4101; InitLatch = 0xD8082;
// 116MHz(PFD=100KHz REFf=10MHz) R_Latch = 0x190; N_Latch = 0x248801; InitLatch = 0xD8082;
// 100MHz(PFD=100KHz REFf=10MHz) R_Latch = 0x190; N_Latch = 0x248801; InitLatch = 0xD8082;
//
/*
#include <Wire.h>
#include <Time.h>
*/
// この下の4つのラッチに設定数をセットして「マイコンボードに書き込み」動作を行う。
// FuncLatchは使用せず。
const unsigned long R_Latch = 0x320; // 32bit
const unsigned long N_Latch = 0x2B4101; // 32bit
const unsigned long FuncLatch = 0xD8082; // 32bit
const unsigned long InitLatch = 0xD8082; // 32bit
unsigned long WriteBuff; // 32bit
// Port definition 実ポートに書替えること。
#define P_DA 2
#define P_CL 3
#define P_LE 4
#define P_CE 5
void setup() {
pinMode(P_DA, OUTPUT); // 出力に設定
pinMode(P_CL, OUTPUT); // 出力に設定
pinMode(P_LE, OUTPUT); // 出力に設定 LE ハイ・レベルになると、ロードされます。
pinMode(P_CE, OUTPUT); // 出力に設定
//シリアルモニタでデバックするときの準備(通常は未使用)
// Serial.begin(9600);
// while (!Serial) ; // wait for Arduino Serial Monitor
delay(200);
digitalWrite(P_CE, LOW);
digitalWrite(P_LE, LOW);
digitalWrite(P_CL, LOW);
}
void loop() {
delay(500);
WriteBuff = InitLatch; // 順番は「Init」==>「R」==>「N」
WriteLatch();
WriteBuff = R_Latch;
WriteLatch();
WriteBuff = N_Latch;
WriteLatch();
delay(500);
while (1) {
int a = 0;
}
}
// ラッチへの書込み
void WriteLatch() {
int hl;
for (int n = 23; n >= 0; n--) {
hl = bitRead(WriteBuff, n);
digitalWrite(P_DA, hl);
// Serial.print(hl);
digitalWrite(P_CL, HIGH);
digitalWrite(P_CL, LOW);
}
digitalWrite(P_CE, HIGH);
digitalWrite(P_LE, HIGH);
digitalWrite(P_LE, LOW);
// Serial.println("");
}
// 一部ラッチ名をL_LatchとしていたのをN_Latchに修正しました(2018/01/17)各周波数を実験した後は、144.050MHzにしておきます。
なお、あまりPDFの周波数を小さくすると発振しませんでした。私の場合はPDFの最小値は20KHzのようでした。
仮実験の後は、ArduinoをNanoに換えてケースに収納していきます。
| 3.ケースへの収納 |


| 9.その他気づいたこと |
| 99.追記用(予備) |