ミニボール盤の低速化実験
ミニボール盤の低速化実験
自作・実験工程のメモとして
01.Oct.2020
(最終更新:2021/04/08)
最近ケース加工時のズレない穴あけのために、ミニボール盤を引っ張り出して使おうとする機会が有りましたが、その回転数の高さから最小回転にしても3,000min-1 (以下、rpmと表記)以上で回っており使いにくいと感じていました。
それでも最低限必要なところにだけは使い、専ら手持ちのドリル・ドライバーでの穴あけで済ませていました。
そんな不満から時々思い出したようにWeb上で低回転のボール盤は無いかと探していると、プーリーを入れ替えた記事が見つかり同じようにやってみることにしました。
その記事には、「プーリーのカバーが閉まらない」と有りましたので、貴重な情報としてカバーも考慮し同じようなことを再現実験してみましたので掲載します。
尚、改造は自己責任でお願いします。
2021/04/08:パーツ頒布終了しました。
低速化改造後のミニボール盤HDP10A
Edit by bluegriffon 3.1
先ず最初に、自宅にあるボール盤 HDP10Aの回転数を知るところから開始します。
回転数検出には、小型ハンディーのタコメーターがAmazon等で売られており、千円台から入手可能な様で購入しようと思っていましたが、これもWeb上の情報から簡単に計測できそうなことが分かり、反射型のセンサーを使用することにしました。
また、回転数表示については大げさにならないように手持ちの測定器で表示して済ませることにしました。
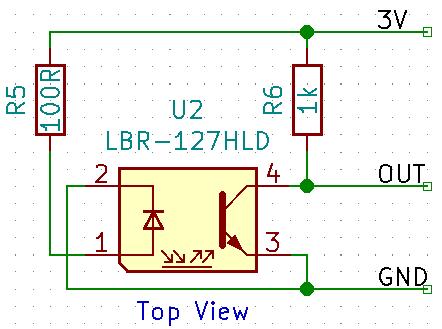
■.センサー回路
1.回路図を描くほども無い配線ですが、秋月電子の[P-04500] フォトリフレクタ(反射タイプ)LBR-127HLDを使いました。
2.ユニバーサル基板上での配線がイメージしやすいように見た目のピン配置にしています。
■.センサー取付と反射板
1.センサーは穴あきの基板に組んで木片にねじ止めしています。
2.その木片をバイスで挟み、5mm程度の間隔に成るように調整します。
3.結果的に木片に固定して使えるため、手で持つタコメーターよりは安定した測定ができると思います。
4.反射板は、チャック部に黒い帯が有ったので、その帯部に台所のアルミホイルを両面テープに貼った紙片を貼りました。(チャック部にサビが出ています)
5.rpm換算がやりやすいように、12片の反射板を大まかな間隔で貼っています。
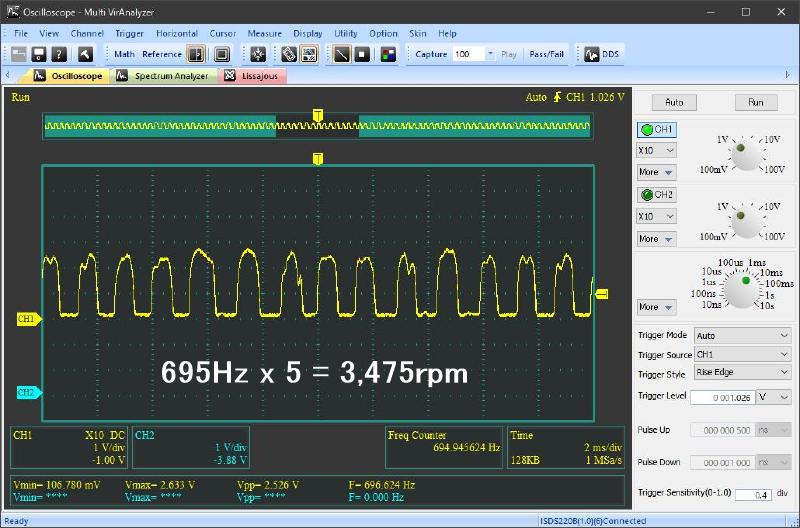
■.オシロスコープ画面
1.オリジナルの状態でスピードボリューム(以下、VR)を最小にした時の波形です。(無負荷時の回転状態)
2.周波数成分として読み取る数字は少し変動しますが、カタログ数値:「回転数:3,200〜6,200rpm」に近いものになっています。
3.回転数は、以下同様に測定していますが、回転の安定とか一切考慮していないため不正確なものとなっています。(目安)
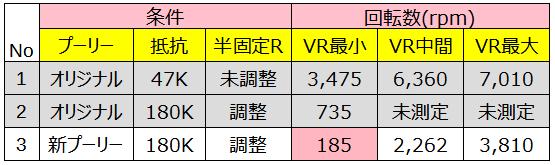
■.オリジナルの回転数(無負荷)
参考にさせていただいたWebページは、「REXON DP2250Rの改造」で検索すると最初に出てくる記事で、この次に実施するプーリーの交換も詳しく紹介されています。
この記事が有ったからやってみようという気になりました。
■.交換する抵抗器の位置
1.この47KΩを交換すると有りましたので、私は手持ちの関係から180KΩと150KΩを試しました。
2.抵抗を交換した後、それぞれ半固定抵抗を少し調整しています。
■.抵抗交換(180KΩ時)の回転数(無負荷)
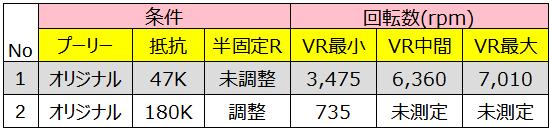
1.半固定抵抗(以下、半固定R)は、回転数が下がる方向に調整しました。
2.このまま使うつもりが無いので、最小時の回転数しか記録していません。
前項と同様に参考にさせていただいたWebページの情報に基づき取り掛かりました。
我が家のミニボール盤はHDP10Aですが、モーター部や主軸部がそっくりなので、そのまま応用できると思い取り掛かりました。
■.オリジナルのプーリー&ベルト
1.プーリーの外径しか測っていませんが、単純計算で半分以下の回転数に(20:46=1:2.3)減速しています。
2.低速化にはできるだけ主軸のプーリーを大きく、モーター軸のプーリーを小さくする必要があります。
■.新プーリー&ベルト
1.前出の参考記事に「プーリーのカバーが閉まらない」という貴重な情報が有りましたので、「カバーが閉まるような」厚さと大きさのプーリーとベルトを選定しました。
2.ベルト長は、「
ベルト周長計算」というサイトの機能を利用させていただきました。
(軸中心間距離66mmで長さを算出)
3.手配先として、AliExpressでプーリーとベルトが一緒にそろうストアー「Sharleen's Store」より入手しました。(プーリーは
厚さ幅15mmのAFタイプ)
モーター用プーリー:3M Type 15T 15Teeth 3mm Pitch Timing Pulley 6mm Inner Bore 11mm Belt Width Synchronous Timing Pulleys
主軸用プーリー:3M Type 65T 65Teeth 3mm Pitch Timing Pulley 10mm Inner Bore 11mm Belt Width Synchronous Timing Pulleys
ベルト:Black Rubber HTD 3M Type Closed Loop Timing Pulley Belt 3mm Picth 258mm Length 10mm Width Synchronous Belt
4.本当は、主軸用プーリーは、60Tが欲しかったんですが、ベルト幅10mmの品が欠品していたようで、止む無く65Tにしています。
5.ここのストアーは、安価なものは数量をまとめてパックしており、モーター用プーリーは3個余ってしまいました。
6.ベルトは2本売りなので、予備として保管しておきます。
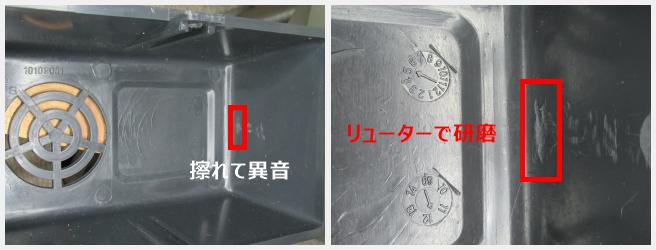
■.新プーリーでのトラブル
1.主軸用プーリーの直径がギリギリだったようで、カバーをかけると前方部でこすれるような異音が出ます。
2.こすれた箇所を見ると「ほんの少し」の接触のようなので、リューターの先でこすれる部分を研磨しました。
3.左右両側は、少し余裕が有るようで大丈夫でした。
■.新プーリー + 抵抗交換(180KΩ時)の回転数(無負荷)
1.十分回転数が落ちてくれましたが、VR最小では止まったりすることもあり実用域では無い回転数です。
2.半固定抵抗でも調整してみましたが、抵抗(180K)が大きいようです。
■.新プーリー + 抵抗交換(150KΩ時)の回転数(無負荷)
1.180KΩを150KΩに交換して、VR最小位置である程度安定して回転する値に調整しました。
2.「VR最大」は使うことは無いと思います。せいぜい、「VR中間」の手前が実用域だと思います。
3.VRを半分の値にすると細かく調整できると思いますが、「そこまですることも・・」と思いますので、これで完了とします。
(1)その他
大幅な改定・追記用