帺嶌岺掱偺儊儌偲偟偰
2006.Aug丏06
![]() cwbufkey2 偺惢嶌
cwbufkey2 偺惢嶌
帺嶌岺掱偺儊儌偲偟偰
2006.Aug丏06
乮僀儞僞乕僼僃乕僗丂僀儞僞僼僃僀僗丂僀儞僞乕僼僃僀僗丂僀儞僞僼僃乕僗乯
| 侾丏RS-232C僀儞僞乕僼僃乕僗 |
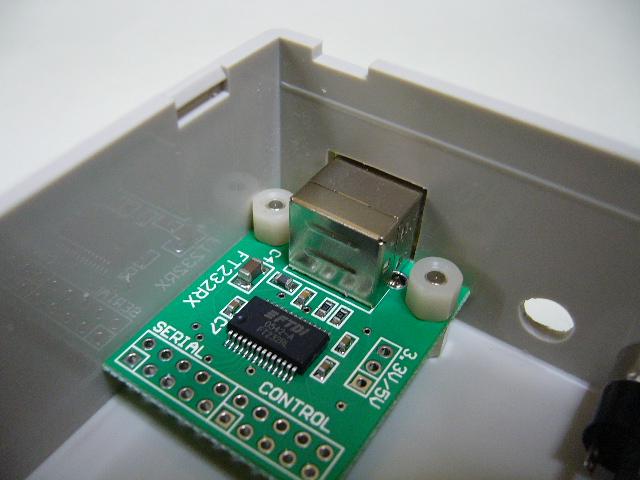
奺幮偐傜丄怓乆側倀俽俛僀儞僞乕僼僃乕僗偑弌偰偄傑偡偑丄巊梡偱偒傞僜僼僩偵惂栺偺戝偒偄倀俽俛偲俠倂僀儞僞乕僼僃乕僗偑堦弿偵側偭偨傕偺傗丄俼俽俀俁俀俠偺怣崋儗儀儖偐傜嵞搙俬俠偺揹埑偵曄姺偡傞僞僀僾偺傕偺傪傛偔尒偐偗傑偡偑丄偙偙偱偼傛傝娙扨偵幚尰偱偒傞僗僩儘儀儕乕儕僫僢僋僗幮偺俥俿俀俁俀俼倃傪巊梡偡傞偙偲偵偟傑偟偨丅
丂埲慜偵俠俬亅倁偺僀儞僞乕僼僃乕僗傪摨幮偺暿僉僢僩傪巊偭偰慻傒棫偰傑偟偨偑丄偦傟傛傝娙扨偵幚尰偱偒偦偆偱偡丅
偦偺帪婥偯偐柍偐偭偨偺偑巆擮偱偡偑丄怓乆傗傞偙偲傕妝偟傒偺堦偮偲偟偰丄妱傝愗傞偙偲傕昁梫偐傕偟傟傑偣傫丅峸擖偟偨俥俿俀俁俀俼倃丂倀俽俛僔儕傾儖僀儞僞乕僼僃乕僗
丂
偦偺懠偺僷乕僣傕丄夵傔偰偦傠偊傑偟偨丅
丂
| 俀丏働乕僗壛岺 |
慜夞偼丄傾僀僨傾偺幚憰偩偗偱偟偨偐傜娙扨偵嶌偭偰偟傑偄傑偟偨偑丄崱夞偼幚梡昳偲偟偰僷僱儖僨僓僀儞偐傜愭偵寛傔偰寠偁偗壛岺傪恑傔傑偟偨丅
椺偵傛偭偰丄僷儚乕億僀儞僩偱僷僱儖僀儊乕僕傪嶌傝丄僷僂僠偱巇忋偘傑偡丅
崱夞偼丄師偺傛偆側僀儊乕僕偵偟傑偟偨丅乮懳徾働乕僗偼丄僞僇僠丂倄俵亅侾侽侽乯
亙--僷儚乕億僀儞僩俀侽侽侽偱嶌偭偨僼傽僀儖偵儕儞僋偟傑偡丅
忋柺偺僼儘儞僩僀儊乕僕偱偼丄嵍偺俽倂埵抲偺傒偼寛傔偰偄傑偡偑丄俆倣倣偺寠偼丄峀偘偰偄傑偣傫丅
埵抲寛傔屻丄僇僢僞乕僫僀僼偱偦傟側傝偺戝偒偝偵峀偘傑偡丅
傑偨丄壓偺儕傾僀儊乕僕偺倀俽俛僐僱僋僞寠乮巐妏乯偼丄傎傏惓妋偱偡偑丄偙偺僀儊乕僕偵傛偭偰寠傪奐偗傞傛傝丄師偺傛偆偵幚暔偁傢偣偑昁梫偩偲巚偄傑偡丅師偼働乕僗傊偺幚憰偺條巕偱偡偑丄僞僇僠偺働乕僗乽倄俵亅侾侽侽乿偺嬿偵埵抲寛傔傪偟偰偄傑偡丅
偙偺巐妏偺寠偑慡偰偺婎弨偵側傝傑偡丅
婎斅偺壓偵偼丄俆倣倣偺僗儁乕僒偱晜偐偣偰巐妏偺寠偺埵抲傪寛傔傑偡丅
丂
僼儘儞僩僷僱儖偺丂俷俶丂偲丂俽倫倕倕倓丂偺娫偵俴俤俢傪擖傟傞偮傕傝偱丄梊掕偟偰偄傑偡丅
俴俤俢傪庢傝晅偗偰傒傑偟偨丅
丂
屻傠偐傜尒偨壛岺忬嫷偱偡丅偙偙傑偱壗搙傕傗傝捈偟偰偄傑偡偺偱丄傎偳傎偳偺埵抲偵廂傑偭偰偄傑偡丅
丂
丂
丂
| 俁丏攝慄慻傒棫偰 |
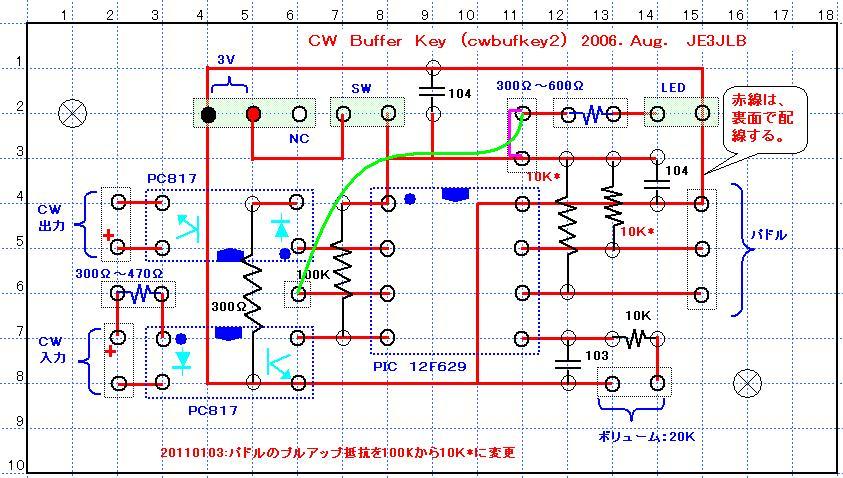
攝慄偼丄慜嶌偲摨條偵夞楬恾偼柍偔偰幚懺攝慄恾偐傜嶌傝巒傔傑偟偨丅
崱搙偼庤嶌傝偱偼側偔丄僄僋僙儖偱彙栚傪嶌傝丄偦傟偲側偔晹昳偺僀儊乕僕傪偺偣偰偄偒丄偁傞掱搙偙偠傫傑傝傑偲傔傞偙偲偑弌棃傑偟偨丅俠倂弌椡偼丄僼僅僩僇僾儔偱乮俴俤俢懁傪俆倣俙乯嬱摦偟偰偄傑偡偑丄弌椡懁偺昁梫擻椡傪丄俬俠亅俈侽侽侽俵偱幚應偟偰傒傞偲丄奐曻帪丗栺3.3倁丄僔儑乕僩帪丗0.26倣俙偺揹棳偑棳傟傑偡丅
擖椡懁偺嬱摦揹棳偑戝偒偡偓傑偡偑丄俴俤俢懁偺掕奿揹棳偐傜尒傞偲敿暘掱搙偩偲巚偄傑偡丅忋懁偺拞墰偐傜塃偵俴俤俢嬱摦夞楬傪慻傫偱偄傑偡偑丄俹俬俠偺俁僺儞偐傜僕儍儞僷乕乮儈僪儕慄乯傪帩偭偰偔傞偐丄亄俁倁儔僀儞偐傜忢帪捠揹乮搷怓慄乯偲偡傞偐傪慖戰偱偒傞傛偆偵偟偰偄傑偡丅
偙偺俹俬俠偺俁僺儞偼丄師崁偱弌偰偒傑偡偑丄僗僺乕僇乕嬱摦偺怣崋傪庢傝弌偡梡搑偵巊偆偙偲傕峫偊偰偍傝丄斈梡惈傪帩偨偣偨偮傕傝偱偡丅
2011/01/03:僷僪儖偺僾儖傾僢僾掞峈傪100K偐傜10K偵曄峏丅
丂
揹抮働乕僗偼丄傆偨乮掙偵側傞乯偺曅懁偵婑偣偰丄壓偐傜俁冇偺嶮僱僕偱庢傝晅偗傑偡丅
揹抮偺庻柦偵偮偄偰
惢嶌屻偺嵟弶偺揹抮岎姺偼丄俀侽侽俋擭侾侽寧侾俀擔偲側傝傑偟偨丅乮岎姺慜偺媽揹抮揹埑丗1.44V乯
傾儖僇儕揹抮偑俁擭偪傚偭偲帩偭偨偙偲偵側傝傑偡丅
偦偺娫偺岎怣偼俇侽嬊傎偳偟偐桳傝傑偣傫偑丄俽倂傪擖傟偭傁側偟偵偟偰悢擔曻抲偟偨偙偲偑壗搙傕偁傝傑偡丅
傑偨丄嬻怳傝偺屇傃弌偟傕懡乆偁傝傑偟偨丅
丂
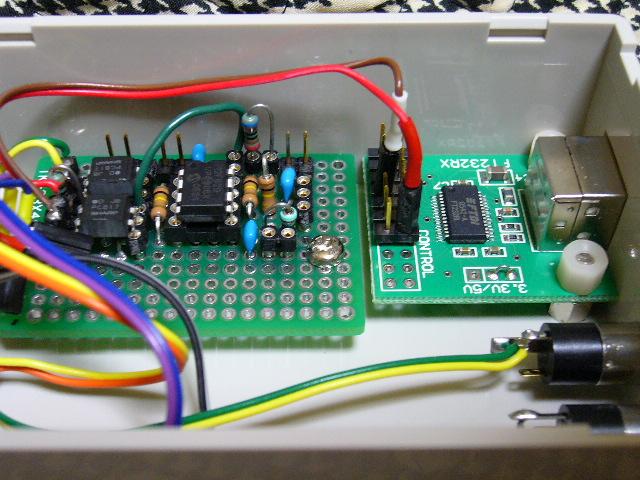
俠倂擖椡偼丄僾儔僗嬱摦乮俢俿俼偲傾乕僗乯側傜傃偵儅僀僫僗嬱摦乮+3.3倁偲俢俿俼乯偑慖戰偱偒傞傛偆偵偟偰偍傝丄師偺夋憸偱偼俥俿俀俁俀俼倃婎斅懁偺攝慄偼儅僀僫僗嬱摦偵偟偰偄傑偡丅
摉弶偼僾儔僗嬱摦偱寢慄偟偰偄傑偟偨偑丄倀俽俛働乕僽儖傪偮側偄偱丄俹俠偺儘僊儞僌僜僼僩傪嬱摦偟偰偄側偄忬懺偺偲偒丄俠倂擖椡偑乽桳傝乿忬懺偑懕偔偨傔丄儅僀僫僗嬱摦偵偟偰丄師偺俠倂憲弌愝掕傕曄峏偟偰偄傑偡丅亂Ctestwin 偺応崌亃
丂
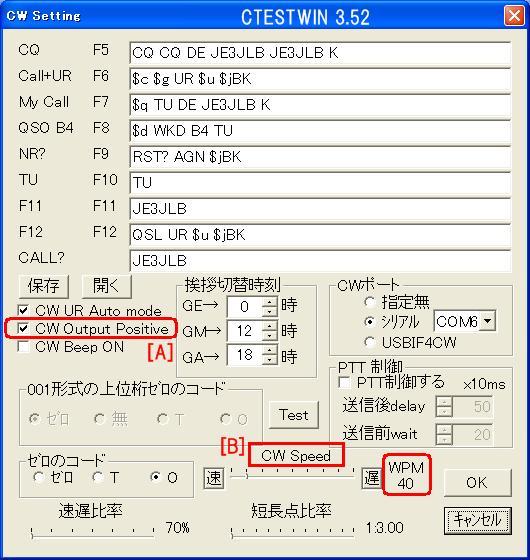
忋婰偺儅僀僫僗嬱摦偵偡傞偲丄俠倲倕倱倲倵倝値偺俠倂憲弌愝掕夋柺偱丄亂CW Outoput Positive亃[A] 傪慖戰偡昁梫偑偁傝傑偡丅
傑偨丄擖椡懍搙傪係侽倂俹俵偱愝寁偟偰偄傞偨傔丄俠俿俤俽俿倂俬俶偐傜偺俠倂憲弌懍搙乮俠倂 俽倫倕倕倓晹暘乯偼係侽倂俹俵偵愝掕偡傞昁梫偑偁傝傑偡丅
乮20091018:夋憸傪擖姺偊偰捛婰乯
丂
丂
丂
| 係丏捛壛婡擻 |
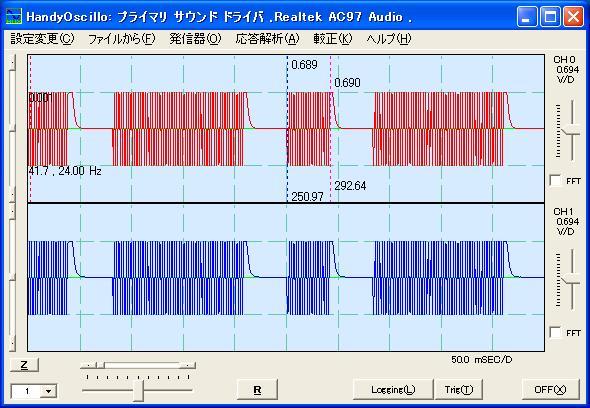
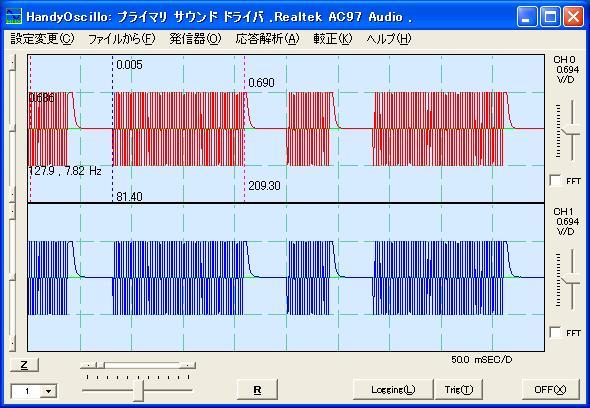
偁傑傝戙傢傝塮偊偼偟傑偣傫偑丄慜嶌偵俹俬俠偺俁僺儞傪巊偭偰丄僒僀僪僩乕儞傪嬱摦偝偣傞僾儘僌儔儉偲丄偦偺抂巕傪偦偺傑傑僷僀儘僢僩儔儞僾乮俴俤俢乯偵墳梡偡傞偲偒偺丄揹尮偑擖偭偰偄傞帠偑暘偐傞僼儔僢僔儏僾儘僌儔儉傕慻傒崬傒傑偟偨丅
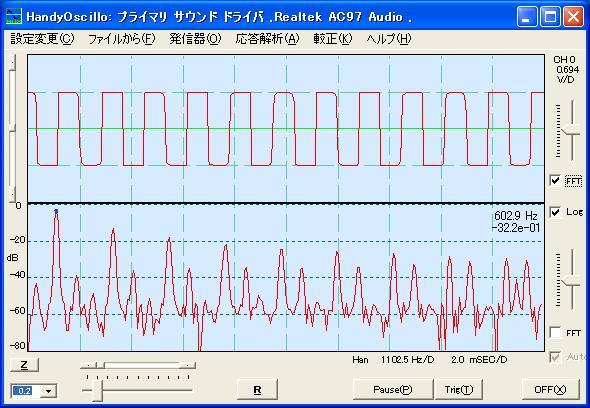
偦偺偆偪偺丄僒僀僪僩乕儞攇宍傪帵偟傑偡丅乮師偺俀夋柺偼丄僪僢僩丒僟僢僔儏偺斾棪傪應偭偰偄傑偡丅乯
丂
丂
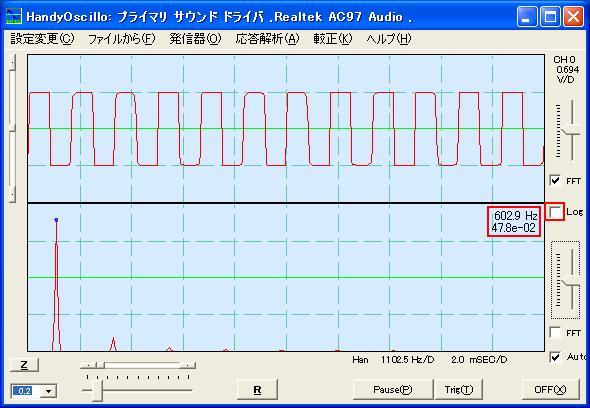
廃攇悢偼丄602.9俫倸偵側傝傑偟偨丅
丂
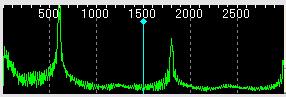
俴倧倗儗儞僕偱廃攇悢惉暘傪尒傞偲丄崅挷攇偑偦偺傑傑弌偰偄傑偡丅
丂
偙偪傜偼俫俙俴俹俽俲偺夋柺偱尒偨夋憸偱偡丅俇侽侽俫倸偺師偼侾俉侽侽俫倸偑弌偰偄傑偡丅
丂
| 俆丏僜乕僗僼傽僀儖 |
捛壛婡擻偲偟偰丄僗僺乕僇乕嬱摦傪偝偣傞僾儘僌儔儉偲丄偦偺抂巕傪偦偺傑傑僷僀儘僢僩儔儞僾乮俴俤俢乯偵墳梡偡傞偲偒偺丄揹尮偑擖偭偰偄傞帠偑暘偐傞僼儔僢僔儏僾儘僌儔儉傕慻傒崬傒傑偟偨丅
乮僄僨傿僞忋偱俿俙俛娫妘傪俉暥帤偵愝掕偟捈偟傑偟偨偑丄偙傟偱傕僐儊儞僩摍偺埵抲偑偢傟偰偄傑偡丅乯--------------------------------------------------------------------
; ;俹俬俠儅僀僐儞偵傛傞丄俠倂僶僢僼傽晅僉乕儎乕僾儘僌儔儉 ;cwbufkey ; ;惢嶌夁掱偺宖嵹偼丄 http://jlb.jp/jlb/jisaku/cwbufkey2/ ; ;V1.00:2006/06/25:(C)JE3JLB 乮嵟壓晹傊僐乕僪杽傔崬傒偁傝乯 ; 2006/07/02:僜乕僗僼傽僀儖偺僐儊儞僩婰弎傪惍棟偟偨丅 ; :俉暥帤俿俙俛偵曄峏偟偨丅 ;V1.01:2006/07/29:僟僢僔儏偺愭摢偐傜栺侾乛俁娫偼丄僷僪儖偺僪僢僩傪婰壇偟側偄丅 ; ;V2.00:2006/07/18:GP4 偵僗僺乕僇弌椡傪晅壛偟偨丅 ; 2011/01/03:僷僪儖偺僾儖傾僢僾掞峈傪100K偐傜10K偵曄峏丅 ; ; ; ; ;俠倂僐乕僪偺掕悢傪妋擣 ;俹俙俼俬俽僐乕僪偺侾儚乕僪乮倂乯偼丄14+8+10+6+8+乮係乯亖50僪僢僩 ;侾暘娫偵 5倂乮 25暥帤乯憲弌偡傞偵偼丄 250僪僢僩/暘 ; 乮4.2dot/Sec 240ms/dot)抁揰楢懕廃攇悢亖 2.1Hz ;侾暘娫偵10倂乮 50暥帤乯憲弌偡傞偵偼丄 500僪僢僩/暘 ; 乮8.3dot/Sec 120ms/dot)抁揰楢懕廃攇悢亖 4.2Hz ;侾暘娫偵20倂乮100暥帤乯憲弌偡傞偵偼丄1,000僪僢僩/暘 ; 乮16.7dot/Sec 60ms/dot)抁揰楢懕廃攇悢亖 8.3Hz ;侾暘娫偵30倂乮150暥帤乯憲弌偡傞偵偼丄1,500僪僢僩/暘 ; 乮25.0dot/Sec 40ms/dot)抁揰楢懕廃攇悢亖12.5Hz ;侾暘娫偵40倂乮200暥帤乯憲弌偡傞偵偼丄2,000僪僢僩/暘 ; 乮33.3dot/Sec 30ms/dot)抁揰楢懕廃攇悢亖16.7Hz ; ; ;---------------------------------------------------------------- ;仧夞楬峔惉偺奣棯乮慡敿妏摍暆暥帤乯 ; ; ; PIC 12F629 3V 3V ; 3V 3V 劇劅劅倁劅劅劉 劆 劆 ; 劆 劆 劆 劆 10K劆 劆10K ; 劆 劋劅劎1 8劌劅劉 (R) (R) ; 劆 劆 劆 俤 劆 劆 ; CW弌椡 <劅劅劅劅劅劎2 7劌劅劅劅劅劏劅劅劅劅(僷僪儖丗僪僢僩) ; 劆 劆 劆 劆 ; SP弌椡 <劅劅劅劅劅劎3 6劌劅劅劅劅劅劅劏劅劅(僷僪儖丗僟僢僔儏) ; (R)100K 劆 劆 10K ; CW擖椡 >劅劏劅劅劅劎4 5劌劅劅劅劍劅劅(R)-劉 ; 劆 劆 (C) (VR) 50K ; 劋劅劅劅劅劅劊 劆103 劆 ; 俤 俤 ; ;丂丂丂丂丂俤偼傾乕僗丄NC:偼枹愙懕丅 ; ;GP0=1 擖椡 僷僪儖丂僪僢僩 ;GP1=1 擖椡 僷僪儖丂僟僢僔儏 ;GP2=1 弌椡 弶婜偼弌椡偱丄侾傪弌椡巜掕偟偰偍偔丅 ; 奜晹偺儃儕儏乕儉傪撉傒崬傓帪偼丄弖娫擖椡偵愝掕偟偰 ; 曻揹帪娫宱夁屻偺俴倧倵僄僢僕妱崬傒傪懸偮丅 ;GP3=1 擖椡 俠倂怣崋擖椡億乕僩乮俴倧倵傾僋僥傿僽乯 ;GP4=0 弌椡 僗僺乕僇弌椡乮僞僀儅侾巊梡丄俇侽侽俫倸乯 ;GP5=0 弌椡 僉乕弌椡乮僴僀傾僋僥傿僽乯 ;---------------------------------------------------------------- ;仧摦嶌偵偮偄偰 ;SQUEEZE Key 擇枃塇偺僷僪儖傪帩偮僉乕儎乕丂偺丄 ;傾僀傾儞價僢僋 mode B 偺摦嶌偵側傞偲偼巚偄傑偡偑丄柧妋偵偼晄柧偱偡丅 ; ;仧俠倂丂俛倳倖倖倕倰偺摦嶌奣梫 ;僷僜僐儞乮埲壓丗俹俠乯偐傜憲傝弌偝傟傞堦掕懍搙偺俠倂怣崋傪丄 ;偦傟埲壓偺懍搙偵尭懍偟偰憲傝弌偡丅乮儃儕儏乕儉挷惍乯 ;乮椺乯 ;1.ezkey 摍偱丄懍搙傪俁侽倂乮150暥帤乯偵愝掕偡傞丅乮梫挷惍乯 ;2.俹俠偐傜偺俠倂弌椡傪丄cwbufkey 偺俠倂擖椡傊擖傟傞丅 ;3.rig 傊偺俠倂弌椡偼丄cwbufkey 偺俠倂弌椡傪巊梡偡傞丅 ;4.偦偺寢壥丄俹俠偐傜偺俠倂弌椡傕僷僪儖偐傜偺憲弌懍搙偲堦弿偵側傞丅 ;5.憲弌懸偪偺晞崋孮偑僶僢僼傽偵巆偭偰偄傞帪偵僷僪儖傪憖嶌偡傞偲丄 ; 偦偺帪揰偱僶僢僼傽傪僋儕儎偡傞丅 ;6.擖椡懍搙傪 30WPM 偵愝掕偟偰丄20 乣 40WPM 掱搙偺嫋梕偁傝丅 ; ;---------------------------------------------------------------- ;仧嶲峫彂愋 ;拞旜恀帯巵挊丂丂僆乕儉幮丂乮暯惉17擭3寧20擔丂戞1斉乯 ;偍傕偟傠偄俹俬俠儅僀僐儞 亅PIC12F675 傪巊偄偙側偡亅 ; ;屌桳掕悢偺儊儌丗3474 ;屌桳掕悢偺儊儌丗3468 ; ; ;仧偦偺懠儊儌 ;悢抣偺弶婜抣偼侾俇恑偺偨傔丄侾侽恑悢偼昁偢 D'15' 偲偡傞丅 ; ; ;---------------------------------------------------------------- ;#define MODE_TM1SP ;仭仧仭丂僞僀儅侾偵傛傞僗僺乕僇儌乕僪丅 ;仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧仭仧 ; LIST P=12F629 INCLUDE P12F629.INC ERRORLEVEL -205 ;傾僙儞僽儖帪偵 205乮 ifdef 乯寈崘傪弌偝側偄丅 ERRORLEVEL -302 ;傾僙儞僽儖帪偵 302乮僶儞僋愗懼偊乯寈崘傪弌偝側偄丅 INDF equ H'0000' ;娫愙撉弌偟丒彂崬傒帪偺壖憐儗僕僗僞乕 FSR equ H'0004' ;娫愙僨乕僞儊儌儕丒億僀儞僞 CB = _CPD_OFF ;僨乕僞EEPROM傕僾儘僌儔儉丒儊儌儕傕 CB &= _CP_OFF ;僐乕僪丒僾儘僥僋僩偟側偄丅 CB &= _BODEN_ON ;僽儔僂儞傾僂僩丒儕僙僢僩傪巊偆丅 CB &= _MCLRE_OFF ;MCLR儕僙僢僩傪巊傢側偄丅 CB &= _PWRTE_ON ;僷儚乕傾僢僾丒僞僀儅傪巊偆丅 CB &= _WDT_OFF ;僂僅僢僠僪僢僌丒僞僀儅傪巊傢側偄丅 CB &= _INTRC_OSC_NOCLKOUT ;撪晹敪怳婍傪巊偆丅 __CONFIG CB __IDLOCS H'0200' ;俬俢儘働乕僔儑儞傊丄僶乕僕儑儞2.00 CBLOCK H'20' GPIO_OUT ;GPIO億乕僩偺弌椡僨乕僞 W_TEMP ;妱崬傒張棟梡 S_TEMP ;妱崬傒張棟梡 CCC ;僇僂儞僞 CCC256 ;僇僂儞僞忋埵 PAD_MEMO ;僷僪儖偺忬懺傪儊儌偟偰偍偔乮Hi 傾僋僥傿僽乯 ; ;bit1 1=僟僢僔儏丂偑墴偝傟偨丅 ; ;bit0 1=僪僢僩丂偑墴偝傟偨丅 RUN_MEMO ;幚峴拞偺忬懺傪儊儌乮Hi 傾僋僥傿僽乯 ;bit5 1=僗儁乕僗怣崋丂乮俠倂僶僢僼傽偱巊梡乯 ;bit4 1=暥帤娫怣崋丂丂乮俠倂僶僢僼傽偱巊梡乯 ;bit3 1=僟僢僔儏怣崋丂0=僟僢僔儏屻偺娫妘乮侾僪僢僩暘乯 ;bit2 1=僪僢僩怣崋丂丂0=僪僢僩屻偺娫妘乮侾僪僢僩暘乯 ;bit1 1=僟僢僔儏憲弌拞 ;bit0 1=僪僢僩憲弌拞 ; ; DM_GPIO ;仛仛仛 debug 仛仛仛 ;MPLAB SIM(debugger)巊梡帪偵丄擖椡億乕僩偺戙懼偲偡傞丅 ;-----------------------;仧偙偙偐傜 CW-buffer梡 CB_BIT_INPOS ;俠倂僶僢僼傽偺價僢僩扨埵奿擺偺擖椡埵抲 CB_BYT_INPOS ;俠倂僶僢僼傽偺僶僀僩扨埵奿擺偺擖椡埵抲 CB_BIT_OTPOS ;俠倂僶僢僼傽偺價僢僩扨埵奿擺偺弌椡埵抲 CB_BYT_OTPOS ;俠倂僶僢僼傽偺僶僀僩扨埵奿擺偺弌椡埵抲 CB_CW_CNT ;俠倂怣崋擖椡悢偺僇僂儞僩 CB_TMP ;俠倂僶僢僼傽偺擖弌椡俿俵俹 ; ;仭bit 1.0 傪巊梡偡傞丅仭 ; ;乮11=僟僢僔儏晞崋丄10=僪僢僩晞崋丄 ; ; 01=暥帤娫丄00=僗儁乕僗乯 CW_CLK ;俠倂怣崋傪俀倣俽偺僀儞僞乕僶儖偱 ; ;妋擣偟偨夞悢傪僇僂儞僩 CW_IN_STA ;俠倂晞崋偺擖椡忬懺傪昞偡丅 ; ;仭bit 2乣0 傪巊梡偡傞丅仭 ; ; 101=俠倂怣崋桳傝丄110=俠倂怣崋偑搑愗傟偨忬懺丄 ; ; 100=晞崋娫傪妋擣嵪傒忬懺 ; ; 乮屻偼丄暥帤娫偲僗儁乕僗偺敾抐偺傒巆傞乯 CW_BUFF ;俠倂晞崋傪奿擺偡傞僶僢僼傽 ; ;偙偺埵抲偐傜嵟廔斣抧傑偱巊偆丅(0x5f) ;-----------------------;仧偙偙傑偱 CW-buffer梡 ENDC ;----------------------- ;CW-buffer梡 CB_POS_ST equ CW_BUFF ;僶僢僼傽偺僗僞乕僩傾僪儗僗 CB_POS_END equ H'5F' ;僶僢僼傽偺僄儞僪傾僪儗僗(0x5f) ;----------------------- ; ;---------------------------------------------------------------- DEF_OP_REG equ B'10000010' ;妱崬傒偺僆僾僔儑儞儗僕僗僞 ;bit7 僂傿乕僋丒僾儖傾僢僾巊傢側偄亖1 ;bit6 INT僺儞棫壓傝僄僢僕傪巊偆偺偱亖侽 ;bit5 僞僀儅侽偺擖椡傪柦椷僋儘僢僋巊偆亖侽 ;bit4 僞僀儅侽偺奜晹僋儘僢僋帪偺愝掕丂倃 ;bit3 僾儕僗働乕儔傪僞僀儅侽偱巊偆亖侽 ;bit2 bit 2乣0 偱僾儕僗働乕儔偺暘廃斾傪愝掕偡傞丅 ; bit-> 2 1 0 ;bit1 0 1 0 亖1:8 ;bit0 256uS X 8 = 2.048mS ; ;僞僀儅侽偺摦嶌僀儊乕僕 ;丂丂丂丂丂仼2.048mS仺丂枅偺妱崬傒 ;丂丂丂丂劆丂丂丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂劇劅劅劉丂丂劇劅劅劉丂丂劇劅劅劉丂丂劇劅丂丂 ;丂丂丂丂劆丂丂劆丂丂劆丂丂劆丂丂劆丂丂劆丂丂劆丂丂丂 ;丂丂丂丂劊丂丂劋劅劅劊丂丂劋劅劅劊丂丂劋劅劅劊丂丂丂 ;丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;仭仭幚應廃攇悢=491Hz 2.037mS ; ;---------------------------------------------------------------- GPIO_MODE equ B'00001011' ; ;GP0-1.3 傪僀儞僾僢僩 ; ;GP2.4-5 傪傾僂僩僾僢僩偵愝掕偡傞丅 ;---------------------------------------------------------------- DEF_INTCON equ B'11110000' ;妱崬傒偺愝掕丅乮僶儞僋侽丒侾嫟捠乯 ;bit7 GIE 妱崬傒傪巊梡偡傞亖侾 ;bit6 PIE1 儗僕僗僞偺妱崬傒傪巊偆偺偱亖侾乮俿俵侾乯 ;bit5 僞僀儅侽僆乕僶乕僼儘乕妱崬傒傪巊偆偺偱亖侾 ;bit4 俬俶俿僺儞擖椡僄僢僕妱崬傒傪巊偆偺偱亖侾 ;bit3 俧俹俬俷擖椡曄壔妱崬傒傪巊傢側偄偺偱亖侽 ;bit2 T0IF 僞僀儅侽僆乕僶乕僼儘乕帪亖侾偲側傞丅 ;bit1 仧仧俧俹俀/俬俶俿僺儞擖椡怣崋偺僄僢僕偑偁偭偨偲偒偩偗亖侾 ;bit0 俧俹俬俷億乕僩偱擖椡僨乕僞偑曄壔偟偨偲偒偩偗亖侾 ;---------------------------------------------------------------- DEF_PIE1_REG equ B'00000001' ;乮僶儞僋侾乯 ;bit7 僨乕僞俤俹俼俷俵巊傢側偄亖侽 ;bit6 俙俢曄姺妱崬傒傪巊傢側偄亖侽 ;bit5 柍偟 ;bit4 柍偟 ;bit3 僐儞僷儗乕僞妱崬傒傪巊傢側偄亖侽 ;bit2 柍偟 ;bit1 柍偟 ;bit0 仧僞僀儅侾僆乕僶僼儘乕妱崬傒傪巊偆亖侾 ; ;---------------------------------------------------------------- DEF_PIR1_REG equ B'00000000' ;乮僶儞僋侽乯 ;bit7 僨乕僞俤俹俼俷俵偺彂偒崬傒廔椆僼儔僌亖侾 ;bit6 俙俢曄姺妱崬傒廔椆僼儔僌亖侾 ;bit5 柍偟 ;bit4 柍偟 ;bit3 僐儞僷儗乕僞弌椡曄壔偱亖侾 ;bit2 柍偟 ;bit1 柍偟 ;bit0 TMR1IF 僞僀儅侾僆乕僶僼儘乕偟偨偲偒亖侾 ; 乮僾儘僌儔儉偱僋儕儎乯 ;偙偺儗僕僗僞偺弶婜僙僢僩埲奜偼丄 ;仧bit0 偺傒 bcf PIR1,TMR1IF 偱僋儕儎偡傞丅 ;---------------------------------------------------------------- DEF_T1CON equ B'00000001' ;乮僶儞僋侽乯 ;bit7 柍偟 ;bit6 奜晹怣崋偱僞僀儅侾傪巭傔側偄亖侽 ;bit5 僾儕僗働乕儔愝掕亖巊傢側偄丅 ;bit4 僾儕僗働乕儔愝掕亖巊傢側偄丅 ;bit3 僞僀儅侾梡偵敪怣夞楬傪巊傢側偄亖侽 ;bit2 奜晹僋儘僢僋摨婜愝掕亖倃 ;bit1 僞僀儅侾偺擖椡僋儘僢僋偵柦椷僋儘僢僋傪巊偆亖侽 ;bit0 仧僞僀儅侾僗僞乕僩偝偣傞偺偱亖侾仛 ;---------------------------------------------------------------- DEF_TM1_STH equ D'252' ;俠倂憲弌拞偺僗僺乕僇壒傪愝掕偡傞丅仛 DEF_TM1_STL equ D'216' ;俬俶俿張棟偺拞偱愝掕偡傞丅仛 ; 250=624Hz 200=586 220=602Hz 216=600Hz ; ;俵俽俛懁 DEF_TM1_STH 251 250 249 ; ;俴俽俛懁 DEF_TM1_STL 45 123 140 ; ; ; ;---------------------------------------------------------------- PAD_DOT equ O'0' ;僷僪儖丗僪僢僩偺價僢僩埵抲丅 PAD_DAS equ O'1' ;僷僪儖丗僟僢僔儏偺價僢僩埵抲丅 CR_BIT equ O'2' ;奜晹偱儃儕儏乕儉傪偮偗偰偄傞抂巕 CW_BIT equ O'3' ;俠倂怣崋擖椡乮僶僢僼傽偱巊梡乯 ST_BIT equ O'4' ;儃儕儏乕儉偵俫傪弌椡偟偰丄 ; ;偦偺屻俴倧倵偵偡傞丅乮巊梡偣偢乯 LED_BIT equ O'5' ;俴俤俢偺價僢僩 DOT_STA equ O'2' ;僪僢僩 僗僥乕僞僗 DAS_STA equ O'3' ;僟僢僔儏 僗僥乕僞僗 ; ;師偺擇偮偼俠倂僶僢僼傽偱巊梡偟丄 ; ;RUN_MEMO 偺埵抲傪帵偡丅 BIT_MJK equ O'4' ;暥帤娫 BIT_SPC equ O'5' ;僗儁乕僗 ; ;---------------------------------------------------------------- ; ;仭仭俠倂怣崋憲弌僞僀儈儞僌偵巊梡仭仭 ; TIME_1 equ D'20' ;嘆僪僢僩偺挿偝偲晞崋娫乮婎弨丗曄偊側偄乯 TIME_2 equ D'36' ;嘇暥帤娫偺挿偝乮岲傒偵傛傝挷惍乯 TIME_3 equ D'60' ;嘊僟僢僔儏偺挿偝乮僪僢僩亊俁攞乯 ; ;乮椺乯1丗3.4 偵偡傞側傜丄20 X 3.4 = 68傪 ; ;丂婰弎偡傞丅 TIME_4 equ D'72' ;嘋暥帤娫屻偺僗儁乕僗挿乮岲傒偵傛傝挷惍乯 ;丂丂丂丂丂丂劆嘆劆嘆劆亙嘇亜劆亙亅丂嘋丂亅亜劆丂丂丂丂丂丂丂丂丂丂 ;丂丂劇劅劉丂劇劅劉丂丂丂丂丂丂丂丂丂丂丂丂丂劇劅劅劅劅劅劉丂丂丂丂 ;丂丂劆丂劆丂劆丂劆亙亅亅丂僗儁乕僗丂亅亅亅亜劆丂丂丂丂丂劆丂丂丂丂 ;丂丂劊丂劋劅劊丂劋劅劅劅劅劅劅劅劅劅劅劅劅劅劊丂丂丂丂丂劋劅丂丂丂 ;丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂劆亙晞崋扨埵亅亜劆亙嘇亜劆嘆劆丂劆亙亅嘊亅亜劆丂丂丂丂丂丂丂丂 ;丂丂劇劅劅劅劅劅劉丂丂丂丂丂劇劅劉丂劇劅劅劅劅劅劉丂丂丂丂丂丂丂丂 ;丂丂劆丂丂丂丂丂劆亙暥帤娫亜劆丂劆丂劆丂丂丂丂丂劆丂丂丂丂丂丂丂丂 ;丂丂劊丂丂丂丂丂劋劅劅劅劅劅劊丂劋劅劊丂丂丂丂丂劋劅劅丂丂丂丂丂丂 ;丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂亜劆丂劆亙丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂晞崋娫丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;---------------------------------------------------------------- ; ;仭仭俠倂怣崋擖椡僞僀儈儞僌偵巊梡乮俠倂亅俛倳倖倖倕倰乯仭仭 ;30WPM偺擖椡傪僒儞僾儕儞僌偡傞偲偒偺棟榑抣偼侾扨埵 20 ;曗惓抣丗 40mS / 2.037mS = 19.6夞 ; ;40WPM偺擖椡傪僒儞僾儕儞僌偡傞偲偒偺棟榑抣偼侾扨埵 15 ;曗惓抣丗 30mS / 2.037mS = 14.7夞 IN_CLK equ D'15' ;侾扨埵摉傝偺僒儞僾儕儞僌夞悢 ; CLK_1 equ D'20' ;20僇僂儞僩乮枹巊梡乯 CLK_2 equ IN_CLK * 2 ;嘇2扨埵僟僢僔儏偲僪僢僩偺敾掕 ; ;晞崋娫偲丄暥帤娫偺敾掕偵巊梡偡傞丅乮俀儢強乯 CLK_3 equ IN_CLK * 3 ;嘊暥帤娫偲僗儁乕僗偺敾掕乮俀儢強乯 CLK_4 equ D'80' ;80僇僂儞僩乮枹巊梡乯 ; ; ;丂丂丂丂丂丂丂丂劆丂丂丂劆丂丂丂丂丂嘊偙偙偱僗儁乕僗偲敾抐丂丂丂丂 ;丂丂劇劅劉丂劇劅劉丂丂丂劆亙暥帤娫亜劆丂丂丂劇劅劅劅劅劅劉丂丂丂丂 ;丂丂劆丂劆丂劆丂劆丂丂丂劆丂丂敾掕丂劆丂丂丂劆丂丂丂丂丂劆丂丂丂丂 ;丂丂劊丂劋劅劊丂劋劅劅劅劅劅劅劅劅劅劅劅劅劅劊丂丂丂丂丂劋劅丂丂丂 ;丂丂丂丂丂丂丂丂劆亙亅僗儁乕僗丗扨埵俈丂亅亜劆丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂丂丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂劇劅劅劅劅劅劉丂劇劅劉丂劇劅劉丂劇劅劅劅劅劅劉丂丂丂丂丂丂丂丂 ;丂丂劆丂丂丂劆丂劆丂劆丂劆丂劆丂劆丂劆丂丂丂丂丂劆丂丂丂丂丂丂丂丂 ;丂丂劊丂丂丂劆丂劋劅劅劅劅劅劊丂劋劅劊丂丂丂丂丂劋劅劅丂丂丂丂丂丂 ;丂丂丂丂丂丂劆丂丂丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂僪僢僩亙亅嘇亅亜丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂丂僟僢僔儏丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂丂丂丂丂丂丂丂丂劆丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 ;丂丂丂丂丂丂丂晞崋娫亙亅嘇亅亜暥帤娫埲忋丂丂丂丂丂丂丂丂丂丂丂丂丂 ; ;---------------------------------------------------------------- DEF_CCC equ D'240' ;僞僀儈儞僌僇僂儞僞壓埵偺弶婜抣 ; ;乮俠倂憲弌懍搙偵娭學偡傞丅乯 ; ;LED_FLASH 偺僞僀儈儞僌梡 sleep偺庤慜偱巊梡偡傞丅 FLASH_ON equ D'250' FLASH_OFF equ D'251' ; ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧揹尮俷俶帪偺僗僞乕僩仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- org 0 ;揹尮倧値僗僞乕僩 goto START_DEF ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧妱崬傒敪惗帪偺張棟仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- org 4 ;妱崬傒敪惗帪偺張棟 movwf W_TEMP ;埲壓偺係峴偼妱崬傒張棟慜偺掕宆張棟丅 movf STATUS,W ; clrf STATUS ; movwf S_TEMP ; ; ISR_INT: btfss INTCON,INTF ;俬俶俿擖椡僄僢僕妱崬傒偐丠 goto INT_EDG_END ;偦傟埲奜側傜丄Timer0 妱崬傒偺妋擣傊峴偔丅 ; bsf STATUS,RP0 ;仭僶儞僋丂侾丂偵偡傞丅 bcf TRISIO,CR_BIT ;俧俹俀價僢僩傪弌椡偵栠偡丅 ; ;乮俫倝倗倛亖僐儞僨儞僒傊廩揹乯 bcf STATUS,RP0 ;仭僶儞僋丂侽丂偵偡傞丅 ;----------------------------廩揹偺偨傔偺帪娫壱偓乮幚幙晄梫乯 nop nop ;----------------------------妱崬傒敪惗偺嵞僗僞乕僩張棟 bsf STATUS,RP0 ;仭僶儞僋丂侾丂偵偡傞丅 bsf TRISIO,CR_BIT ;俧俹俀價僢僩傪堦帪揑偵擖椡偵偡傞丅 bcf STATUS,RP0 ;仭僶儞僋丂侽丂偵偡傞丅 ;----------------------------仧仧偙偙偐傜妱崬傒張棟傪彂偔 incfsz CCC,F ;CCC +1 僆乕僶乕僼儘乕偐丠丗僗僉僢僾 goto INT_EDG_E ;僆乕僶乕僼儘乕偱偼側偄偺偱廔椆丅 incf CCC256,F ;忋埵偺僇僂儞僞丂亄侾 movlw DEF_CCC movwf CCC ;仧僞僀儈儞僌僇僂儞僞壓埵傪弶婜僙僢僩 INT_EDG_E: ;----------------------------仧仧偙偙傑偱妱崬傒張棟傪彂偔 bcf INTCON,INTF ;INTF 擖椡僄僢僕妱崬傒僼儔僌傪丄 ;僾儘僌儔儉偱僋儕儎偟偰暅婣偡傞丅 INT_EDG_END: ; goto ISR_INT_END ;仧桳偭偰傕摦嶌偵娭學側偄偑丄 ; ;俬俶俿擖椡僄僢僕妱崬傒偺妋擣屻偵丄 ; ;師偺僞僀儅妱崬傒傪僠僃僢僋偡傞偨傔偵 ; ;僐儊儞僩埖偄偲偡傞丅 TM0_INT: ;僞僀儅侽偺妱崬傒張棟 btfss INTCON,T0IF ;僞僀儅侽妱崬傒偐丠 goto TM0_INT_END ;偦傟埲奜側傜丄僞僀儅侽偺廔椆傊峴偔丅 ; ;----------------------------仧仧偙偙偐傜妱崬傒張棟傪彂偔 incf CW_CLK,F ;俠倂擖椡怣崋偺撉傒崬傒僇僂儞僞傪亄侾偡傞 ;----------------------------仧仧偙偙傑偱妱崬傒張棟傪彂偔 bcf INTCON,T0IF ;僞僀儅侽偺妱崬傒僼儔僌傪僋儕儎 TM0_INT_END: goto TM1_INT ;懯栚墴偟揑側僕儍儞僾 TM1_INT: ;僞僀儅侾偺妱崬傒張棟 btfss PIR1,TMR1IF ;僞僀儅侾 妱崬傒偐丠 goto TM1_INT_END ;偦傟埲奜側傜丄僞僀儅侾偺廔椆傊峴偔丅 ; ;---------------------------- 仧仧偙偙偵妱崬傒張棟傪彂偔 btfsc GPIO_OUT,LED_BIT ;俠倂怣崋憲弌拞偱偼柍偄丠 goto TM1_INT1 bcf T1CON,TMR1ON ;仧僞僀儅侾傪巭傔傞丅仛 bcf GPIO_OUT,ST_BIT ;僗僺乕僇弌椡傪俴倧倵偵偡傞丅 goto TM1_INT3 ;僩僌儖摦嶌偣偢偵廔椆丅 TM1_INT1: ;僩僌儖摦嶌張棟奐巒 call TM1_RESTART ;僞僀儅侾傪嵞婲摦仛 ; btfss GPIO_OUT,ST_BIT ;偙偺僩僌儖摦嶌偱廃攇悢傪敪惗偝偣傞丅 goto TM1_INT2 ; ; bcf GPIO_OUT,ST_BIT ; goto TM1_INT3 ; ; TM1_INT2: ; bsf GPIO_OUT,ST_BIT ; ; ; ;僩僌儖摦嶌張棟廔椆 TM1_INT3: movf GPIO_OUT,W ;壓偺柦椷偲儁傾偱億乕僩傊弌椡 movwf GPIO bcf PIR1,TMR1IF ;僞僀儅侾偺妱崬傒僼儔僌傪僋儕儎 ; goto TM1_INT_END ;懯栚墴偟揑側僕儍儞僾 TM1_INT_END: ISR_INT_END: movf S_TEMP,W ;埲壓偺係峴偼妱崬傒暅婣偺掕宆張棟丅 movwf STATUS ; swapf W_TEMP,F ; swapf W_TEMP,W ; retfie ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧埲壓偼丄揹尮俷俶屻偵侾夞偩偗捠夁偡傞丅仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- ; MAIN_LOOP0: bcf INTCON,INTF ;俬俶俿擖椡僄僢僕妱崬傒僼儔僌傪僋儕儎 ;------------------------------- ;俬俶俿擖椡僄僢僕妱崬傒敪惗偺僗僞乕僩張棟 bsf STATUS,RP0 ;仭僶儞僋丂侾丂偵偡傞丅 bsf TRISIO,CR_BIT ;俧俹俀價僢僩傪堦帪揑偵擖椡偵偡傞丅 bcf STATUS,RP0 ;仭僶儞僋丂侽丂偵偡傞丅 ;---------------------------------------------------------------- ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧儊僀儞儖乕僠儞偺愭摢仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- MAIN_LOOP: ;-------------------------- 僷僪儖擖椡偺妋擣 PAD_CHECK0: btfsc RUN_MEMO,PAD_DOT ;僪僢僩憲弌拞埲奜側傜僪僢僩傪妋擣 goto PAD_CHECK1 ;僟僢僔儏僠僃僢僋傊 btfsc GPIO,PAD_DOT ;僪僢僩懁偑墴偝傟偨偐丠 goto PAD_CHECK1 ;僟僢僔儏僠僃僢僋傊 call TM0_CLR ;仧僷僪儖偑墴偝傟偨偲偒偼丄 ;俠倂僶僢僼傽乕傪慡僋儕儎偡傞丅 bsf PAD_MEMO,PAD_DOT ;僷僪儖儊儌傊僪僢僩傪僙僢僩 PAD_CHECK1: btfsc RUN_MEMO,PAD_DAS ;僟僢僔儏憲弌拞埲奜側傜僟僢僔儏傪妋擣 goto PAD_CHECK_E ;僷僪儖妋擣廔椆傊 btfsc GPIO,PAD_DAS ;僟僢僔儏懁偑墴偝傟偨偐丠 goto PAD_CHECK_E call TM0_CLR ;仧僷僪儖偑墴偝傟偨偲偒偼丄 ; ;俠倂僶僢僼傽乕傪慡僋儕儎偡傞丅 bsf PAD_MEMO,PAD_DAS ;僷僪儖儊儌傊僪僢僩傪僙僢僩 PAD_CHECK_E: goto RUN_CHECK0 ;偁偊偰婰弎偟偨丅乮張棟偵塭嬁側偟乯 ;---------------------------------------------------------------- ;------------------------------- 幚峴拞偺張棟傪妋擣 RUN_CHECK0: btfss RUN_MEMO,PAD_DOT ;僪僢僩憲弌拞偐丠 goto RUN_CHECK1 ;師偺僠僃僢僋傊 goto RUN_DOT_0 ;僪僢僩憲弌張棟傊峴偔丅 RUN_CHECK1: btfss RUN_MEMO,PAD_DAS ;僟僢僔儏憲弌拞偐丠 goto RUN_CHECK_E ;師偺僠僃僢僋傊 goto RUN_DAS_0 ;僟僢僔儏憲弌張棟傊 RUN_CHECK_E: btfss RUN_MEMO,BIT_MJK ;仧暥帤娫憲弌拞偐丠 goto RUN_CHECK_E1 ;師偺僠僃僢僋傊 goto RUN_MJK_0 ;暥帤娫憲弌張棟傊峴偔丅 RUN_CHECK_E1: ; btfss RUN_MEMO,BIT_SPC ;仧僗儁乕僗憲弌拞偐丠 goto RUN_CHECK_EE ;師偺僠僃僢僋傊 goto RUN_SPC_0 ;僗儁乕僗憲弌張棟傊峴偔丅 RUN_CHECK_EE: call MEMO_DOT_CHECK ;僒僽儖乕僠儞偱僪僢僩墴壓傪妋擣 call MEMO_DAS_CHECK ;僒僽儖乕僠儞偱僟僢僔儏墴壓傪妋擣 ;---------------------------------------------------------------- ;俠倂丂俛倳倖倖倕倰梡 ; ;仧仧仧仧俠倂擖椡偑偁傞偐丠 movf CB_CW_CNT,F ;僛儘偐敾掕乮撪梕偵塭嬁偟側偄乯 btfss STATUS,Z ;擖椡暥帤悢偑僛儘側傜僗僉僢僾 call CB_CHECK ;CW僶僢僼傽傪僠僃僢僋偵峴偔 goto PAD_LOOP_E ;仧仧僷僪儖張棟偺嵟廔埵抲傊 ; ;---------------------------------------------------------------- RUN_DOT_0: ;僪僢僩憲弌張棟 btfss RUN_MEMO,DOT_STA ;怣崋晹暘偐敾掕偡傞丅 goto RUN_DOT_1 movlw TIME_1 ;扨埵帪娫侾傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_1(僪僢僩帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_DOT_E ;仧RUN_DOT 嵟廔張棟傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 call CW_OFF ;怣崋憲弌傪巭傔傞丅 bcf RUN_MEMO,DOT_STA ;忬懺傪怣崋憲弌屻偺娫妘帪娫偵偡傞丅 goto RUN_DOT_E ;RUN_DOT 嵟廔張棟傊 RUN_DOT_1: movlw TIME_1 ;扨埵帪娫侾傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_1(僪僢僩帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_DOT_E ;仧RUN_DOT 嵟廔張棟傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bcf RUN_MEMO,PAD_DOT ;僪僢僩憲弌偺廔椆 bcf PAD_MEMO,PAD_DOT ;僷僪儖偺僪僢僩儊儌傪僋儕儎 ; bcf PAD_MEMO,PAD_DAS ;仧偙傟傪桳岠偵偡傞偲丄傾僀傾儞價僢僋偺 ; ; mode A 偵側傞偼偢丅乮傕偆堦売強桳傝乯 ; call MEMO_DAS_CHECK ;僪僢僩張棟捈屻偼丄 ; ;僟僢僔儏偺忬懺傪桪愭妋擣偡傞丅 ; ;(傾僀傾儞僺僢僋摦嶌) RUN_DOT_E: goto PAD_LOOP_E ;仧仧僷僪儖張棟偺嵟廔埵抲傊 ;---------------------------------------------------------------- ;------------------------- RUN_DAS_0: ;僟僢僔儏憲弌張棟 btfss RUN_MEMO,DAS_STA ;怣崋晹暘偐敾掕偡傞丅 goto RUN_DAS_1 ; ;---------------------------------- movlw TIME_1 ;扨埵帪娫 1 傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_1(僪僢僩帪娫憡摉)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 bcf PAD_MEMO,PAD_DOT ;僷僪儖偺僪僢僩儊儌傪僋儕儎 ;仧仧仧僟僢僔儏偺愭摢偐傜栺侾乛俁娫偼丄 ;僷僪儖偺僪僢僩傪婰壇偟側偄丅 ; ;---------------------------------- movlw TIME_3 ;扨埵帪娫俁傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_3(僟僢僔儏帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_DAS_E ;仧RUN_DAS 嵟廔張棟傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 call CW_OFF ;怣崋憲弌傪巭傔傞丅 bcf RUN_MEMO,DAS_STA ;忬懺傪怣崋憲弌屻偺娫妘帪娫偵偡傞丅 goto RUN_DAS_E ;仧RUN_DAS 嵟廔張棟傊 RUN_DAS_1: movlw TIME_1 ;扨埵帪娫侾傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_1(僪僢僩帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_DAS_E ;仧RUN_DAS 嵟廔張棟傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bcf RUN_MEMO,PAD_DAS ;僟僢僔儏憲弌偺廔椆 bcf PAD_MEMO,PAD_DAS ;僷僪儖偺僟僢僔儏儊儌傪僋儕儎 ; bcf PAD_MEMO,PAD_DOT ;仧偙傟傪桳岠偵偡傞偲丄傾僀傾儞價僢僋偺 ; ; mode A 偵側傞偼偢丅乮傕偆堦売強桳傝乯 call MEMO_DOT_CHECK ;僟僢僔儏張棟捈屻偼丄 ; ;僪僢僩偺忬懺傪桪愭妋擣偡傞丅 ; ;(傾僀傾儞僺僢僋摦嶌) RUN_DAS_E: goto PAD_LOOP_E ;仧仧僷僪儖張棟偺嵟廔埵抲傊 ;---------------------------------------------------------------- ;------------------------- RUN_MJK_0: ;暥帤娫憲弌張棟 movlw TIME_2 ;扨埵帪娫 2傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_2(暥帤娫帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_MJK_E call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 clrf RUN_MEMO RUN_MJK_E: goto PAD_LOOP_E ;仧仧僷僪儖張棟偺嵟廔埵抲傊 ;------------------------- RUN_SPC_0: ;僗儁乕僗憲弌張棟 movlw TIME_4 ;扨埵帪娫 4傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜TIME_4(僗儁乕僗帪娫)傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,C ;C=1 偱丄帪娫偑宱夁偟偨丅 goto RUN_SPC_E call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 clrf RUN_MEMO RUN_SPC_E: goto PAD_LOOP_E ;偁偊偰婰弎偟偨丅乮張棟偵塭嬁側偟乯 PAD_LOOP_E: ;仧仧僷僪儖張棟偺嵟廔埵抲仧仧 goto CB_LOOP ;偁偊偰婰弎偟偨丅乮張棟偵塭嬁側偟乯 ;---------------------------------------------------------------- ; ;偙偙偐傜俠倂擖椡偺僠僃僢僋傪偡傞丅 ; ; 仭CW_IN_STA偺忬懺仭 ; ; 0= 弶婜抣丄 ; ; 1=俠倂怣崋桳傝丄2=俠倂怣崋偑搑愗傟偨忬懺乮暥帤娫懸偪乯丄 ; ; 3=暥帤娫傪妋擣拞丄4=僗儁乕僗妋擣拞 ;----------------------------------------------------------------- CB_LOOP: movf CW_IN_STA,F ;忬懺偑僛儘偐傪妋擣 btfss STATUS,Z ;僛儘偐丠 goto CB_LOOP1 ;擖椡偑桳傞忬懺傪張棟拞丂goto btfsc GPIO,CW_BIT ;億乕僩偵俠倂怣崋桳傞忬懺偐丠 goto CB_LOOP_E ;怣崋柍偟... CB_LOOP_0R5: ;仧搑拞偐傜怣崋偑偁偭偨偲偒偺張棟埵抲丅 movlw 1 ;丂1 傪 movwf CW_IN_STA ;忬懺傊僙僢僩 clrf CW_CLK ;俀倣俽僀儞僞乕僶儖傪僋儕儎 goto CB_LOOP_E ;LOOP 偺嵟屻傊丅 ;--------------------------------------- CB_LOOP1: movf CW_IN_STA,W ;忬懺傪屇傃弌偟 sublw D'1' ; 1=俠倂怣崋桳傝 btfss STATUS,Z ; goto CB_LOOP2 btfss GPIO,CW_BIT ;億乕僩偵俠倂怣崋柍偄忬懺偐丠 goto CB_LOOP_E ;億乕僩偵俠倂怣崋桳傟偽丂丂丂LOOP 偺嵟屻傊丅 ; ;怣崋偑搑愗傟偨偲偒偵丄埲壓偺張棟傪偡傞丅 movlw 2 ;2 傪 movwf CW_IN_STA ;忬懺傊僙僢僩 movf CW_CLK,W ;僀儞僞乕僶儖僇僂儞僞撉傒弌偟丅 sublw CLK_2 ;僪僢僩偲僟僢僔儏偺娫傪敾掕偡傞丅 ; ;40 - CW_CLK = 儅僀僫僗帪偼丄C = 0 btfsc STATUS,C ;僟僢僔儏偐丠丂丂乮 C bit偼晧榑棟乯 goto CB_DOT_SET ;僪僢僩傪僙僢僩偡傞丅 goto CB_DAS_SET ;僟僢僔儏傪僙僢僩 ;--------------------------------------- CB_LOOP2: movf CW_IN_STA,W ;忬懺傪屇傃弌偟 sublw D'2' ; 2=俠倂怣崋偑搑愗傟偨忬懺乮暥帤娫懸偪乯 btfss STATUS,Z ; goto CB_LOOP3 btfss GPIO,CW_BIT ;億乕僩偵俠倂怣崋柍偗傟偽僗僉僢僾 goto CB_LOOP_0R5 ;仧師偺晞崋張棟偺偨傔愭摢晅嬤偐傜嵞僗僞乕僩 movf CW_CLK,W ;僀儞僞乕僶儖僇僂儞僞撉傒弌偟丅 sublw CLK_2 ;晞崋娫偲暥帤娫偺娫傪敾掕偡傞丅 ; ;40 - CW_CLK = 儅僀僫僗帪偼丄C = 0 btfsc STATUS,C ;暥帤娫偐丠丂丂乮 C bit偼晧榑棟乯 goto CB_LOOP_E ;晞崋娫偺埖偄乮壗傕偟側偄乯 movlw 3 ;3 傪乮暥帤娫乯 movwf CW_IN_STA ;忬懺傊僙僢僩 goto CB_MJK_SET ;暥帤娫傪僙僢僩 ;--------------------------------------- CB_LOOP3: movf CW_IN_STA,W ;忬懺傪屇傃弌偟 sublw D'3' ; 3=暥帤娫傪妋擣拞 btfss STATUS,Z ; goto CB_LOOP_E btfss GPIO,CW_BIT ;億乕僩偵俠倂怣崋柍偗傟偽僗僉僢僾 goto CB_LOOP_0R5 ;仧師偺晞崋張棟偺偨傔愭摢晅嬤偐傜嵞僗僞乕僩 movf CW_CLK,W ;僀儞僞乕僶儖僇僂儞僞撉傒弌偟丅 sublw CLK_3 ;暥帤娫偲僗儁乕僗偺娫傪敾掕偡傞丅 ; ;60 - CW_CLK = 儅僀僫僗帪偼丄C = 0 btfsc STATUS,C ;僗儁乕僗偐丠丂丂乮 C bit偼晧榑棟乯 goto CB_LOOP_E ;暥帤娫偺埖偄乮壗傕偟側偄乯 clrf CW_IN_STA ;忬懺傪僋儕儎 goto CB_SPC_SET ;僗儁乕僗僙僢僩 ;--------------------------------------- CB_LOOP3_A: ;僞僀儅僆乕僶乕偐丠 movf CW_CLK,W ;僀儞僞乕僶儖僇僂儞僞撉傒弌偟丅 sublw CLK_3 ;暥帤娫偲僗儁乕僗偺娫傪敾掕偡傞丅 ; ;60 - CW_CLK = 儅僀僫僗帪偼丄C = 0 btfsc STATUS,C ;僗儁乕僗偐丠丂丂乮 C bit偼晧榑棟乯 goto CB_LOOP_E ;暥帤娫偺埖偄乮壗傕偟側偄乯 clrf CW_IN_STA ;仧忬懺傪僋儕儎 goto CB_SPC_SET ;僗儁乕僗僙僢僩 ;---------------------------------------------------------------- CB_DAS_SET: ;CW_Buffer 偵僟僢僔儏傪僙僢僩 movlw B'00000011' ;dash goto CB_ALL_SET ;仧晞崋僙僢僩偺嫟捠張棟傊丅 ;--------------------------------------- CB_DOT_SET: ;CW_Buffer 偵僪僢僩傪僙僢僩 movlw B'00000010' ;dot goto CB_ALL_SET ;仧晞崋僙僢僩偺嫟捠張棟傊丅 ;--------------------------------------- CB_SPC_SET: ;CW_Buffer 偵僗儁乕僗傪僙僢僩 movlw B'00000000' ;僗儁乕僗 goto CB_ALL_SET ;仧晞崋僙僢僩偺嫟捠張棟傊丅 ;--------------------------------------- CB_MJK_SET: ;CW_Buffer 偵暥帤娫傪僙僢僩 movlw B'00000001' ;暥帤娫 goto CB_ALL_SET ;仧晞崋僙僢僩偺嫟捠張棟傊丅 ;--------------------------------------- CB_ALL_SET: ;仧晞崋僙僢僩偺嫟捠張棟 clrf CW_CLK ;俀倣俽僀儞僞乕僶儖傪僋儕儎 movwf CB_TMP ;僥儞億儔儕偵抲偄偰 call PUT_BUF ;僶僢僼傽傊奿擺 goto CB_LOOP_E ;LOOP 偺嵟屻傊丅 ;---------------------------------------------------------------- CB_LOOP_E: nop MAIN_LOOP_E: ; ;仧柦椷僋儘僢僋傪僞僀儅擖椡偵偡傞偲丄 ; ;sleep 拞偼僇僂儞僩傾僢僾偟側偄丅 ; ;偦偺偨傔俠倂僶僢僼傽偺妋擣傪偟偰丄 ; ;sleep 儌乕僪傊擖傞丅 ; ;sleep 拞偼丄俠俼偵傛傞俬俶俿妱崬傒偱嵞婲摦偡傞丅 ; ;乮悢倣俽乣栺侾侽倣俽娫妘乯 btfss GPIO,CW_BIT ;億乕僩偵俠倂怣崋柍偄忬懺偐丠 goto MAIN_LOOP_ESS ;仧乮俠倂怣崋桳傝乯SleepSkip 傊峴偔丅 movf CW_IN_STA,F ;忬懺偑僛儘偐丠傪妋擣 btfss STATUS,Z ;僛儘側傜僗僉僢僾 goto MAIN_LOOP_ESS ;仧乮僶僢僼傽摦嶌拞乯SleepSkip 傊峴偔丅 movf CB_CW_CNT,F ;俠倂怣崋擖椡悢偺僛儘妋擣 btfss STATUS,Z ;僛儘側傜僗僉僢僾 goto MAIN_LOOP_ESS ;仧乮僶僢僼傽偵張棟懸偪偺晞崋桳傝乯SleepSkip 傊峴偔丅 movf RUN_MEMO,F ;俠倂怣崋偺憲弌張棟拞 btfss STATUS,Z ;僛儘側傜僗僉僢僾 goto MAIN_LOOP_ESS ;仧乮憲弌張棟拞乯SleepSkip 傊峴偔丅 ; ;仛仛仛仛丂LED_FLASH ; ;俽俹弌椡傪俴俤俢揰摂偵巊偭偰偄傞偲偒偼丄 ; ;揹尮俷俶忬懺傪帵偡僼儔僢僔儏摦嶌傪偝偣傞丅 FLASH: movlw FLASH_ON ;僼儔僢僔儏俷俶偺扨埵帪娫傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜扨埵帪娫傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,Z ;Z=1 偱丄帪娫偑宱夁偟偨丅 goto FLASH2 bsf GPIO_OUT,ST_BIT ;僗僺乕僇弌椡抂巕傪 High 偵偡傞丅 call IOPORT ;億乕僩弌椡丅 goto FLASH3 FLASH2: movlw FLASH_OFF ;僼儔僢僔儏俷俶偺扨埵帪娫傪 W 傊屇傃弌偡丅 subwf CCC256,W ;CCC256僇僂儞僞偐傜扨埵帪娫 傪堷偔丅 ; ;寢壥傪 W 儗僕僗僞偵擖傟傞丅 btfss STATUS,Z ;Z=1 偱丄帪娫偑宱夁偟偨丅 goto FLASH3 bcf GPIO_OUT,ST_BIT ;僗僺乕僇弌椡傪 Low 偵偡傞丅 call IOPORT ;億乕僩弌椡丅 FLASH3: ; ;懸婡帪偺揹棳乮懍搙愝掕偵傛傝曄摦乯 sleep ;sleep憓擖偱 0.20mA 乣0.64mA ; ;sleep憓擖偟側偄偲 0.62mA 乣0.76mA nop ;sleep 偺偍傑偠側偄丅 MAIN_LOOP_ESS: ;仧SleepSkip 偺埵抲丅 goto MAIN_LOOP ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧弶婜愝掕仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- START_DEF: ;---------------------------; bcf STATUS,RP0 ;仭仭僶儞僋丂侽丂偵偡傞丅 call H'3FF' ;撪晹敪怳婍傪僉儍儕僽儗乕僔儑儞偡傞丅 bsf STATUS,RP0 ;仭仭僶儞僋丂侾丂偵偡傞丅 movwf OSCCAL bcf STATUS,RP0 ;仭僶儞僋丂侽丂偵偡傞丅 movlw B'00000111' ;僐儞僷儗乕僞乕倧倖倖偵偡傞 movwf CMCON clrwdt ;倂俢俿傪僋儕儎偡傞丅乮俹俽俙價僢僩娭楢乯 bsf STATUS,RP0 ;仭仭僶儞僋丂侾丂偵偡傞丅 clrf WPU ;僂傿乕僋丒僾儖傾僢僾偺奺價僢僩愝掕柍偟丅 movlw DEF_PIE1_REG ;僞僀儅侾娭楢乮僶儞僋侾乯 movwf PIE1 movlw DEF_OP_REG ;妱崬傒偺僆僾僔儑儞儗僕僗僞弶婜抣 movwf OPTION_REG ;俬俶俿僺儞擖椡怣崋偺 ; ;棫壓傝僄僢僕妱崬傒愝掕丄(bank1) ; clrf ANSEL ;俧俹俬俷億乕僩傪僨僕僞儖俬/俷儌乕僪偵偡傞丅 ; ;12F675 偺傒偺愝掕丅 movlw GPIO_MODE ;愭摢偺 equ 掕媊 B'00001011' movwf TRISIO ;GP2 偼弌椡巜掕丅 bcf STATUS,RP0 ;仭仭僶儞僋丂侽丂偵偡傞丅 movlw DEF_PIR1_REG ;僞僀儅侾娭楢乮僶儞僋侽乯 movwf PIR1 movlw DEF_T1CON ;僞僀儅侾娭楢乮僶儞僋侽乯 movwf T1CON ;------------------------------------------------------------------- movlw B'00000100' ;GP2 偩偗偼俫倝倗倛傪弌椡巜掕丅俽倢倕倕倫帪偵拲堄丅 movwf GPIO_OUT ;GPIO_OUT偺撪梕傪弶婜壔偡傞 乮儗僕僗僞乕忋偺億乕僩乯 call IOPORT ;弶婜抣傪弌椡億乕僩偵彂偒崬傒乮昁恵乯 ;------------------------------------------------------------------- ; call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 call TM0_CLR ;僞僀儅侽娭楢偺僋儕儎 ;仧仧仧偙偺偁偨傝偱儊儌儕僋儕儎傪偟偰偍偔 clrf RUN_MEMO ;憲弌拞怣崋儊儌傪僋儕儎 clrf PAD_MEMO ;僷僪儖偺忬懺傪僋儕儎 movlw DEF_INTCON ;仧仧妱崬傒偺僙僢僩仧仧 movwf INTCON goto MAIN_LOOP0 ;------------------------------------------------------------------- ;/////////////////////////////////////////////////////////////////// ; 仧仧仧偙偙傛傝壓偼丄僒僽儖乕僠儞傪婰弎偡傞丅仧仧仧 ;/////////////////////////////////////////////////////////////////// ;------------------------------------------------------------------- ; ;妱崬傒僞僀儈儞僌梡偺僇僂儞僞僋儕儎 CNT_CLR: movlw DEF_CCC ;愝掕抣偑偁傞偨傔僒僽儖乕僠儞偱掕媊偡傞丅 ;乮懠偵傕偆堦売強偁傝乯 movwf CCC ;僞僀儈儞僌僇僂儞僞傪弶婜僙僢僩 clrf CCC256 ;僞僀儈儞僌僇僂儞僞忋埵傪弶婜僙僢僩 return ;------------------------------------------------------------------- TM0_CLR: ;俠倂僶僢僼傽婡擻偱巊梡偡傞丅 movlw CB_POS_ST ;仧仧仧丂僗僞乕僩傾僪儗僗傪僙僢僩 movwf CB_BYT_INPOS ;僶僀僩偺擖椡埵抲 movwf CB_BYT_OTPOS ;僶僀僩偺弌椡埵抲 movwf FSR ;憡懳傾僪儗僗巜帵 clrf INDF ;俠倂僶僢僼傽偺愭摢傪僋儕儎 clrf CB_BIT_INPOS ;價僢僩偺擖椡埵抲 clrf CB_BIT_OTPOS ;價僢僩偺弌椡埵抲 clrf CB_CW_CNT ;僶僢僼傽偵擖偭偨俠倂晞崋悢 clrf CB_TMP ;晞崋擖弌椡偺僥儞億儔儕 clrf CW_IN_STA ;俠倂晞崋偺擖椡忬懺 clrf CW_CLK ;妱崬傒偱巊偆僇僂儞僞 return ;------------------------------------------------------------------- ;---------------------------------------;仭 壗傕幚峴拞偱柍偄帪偵幚峴偡傞丅仭 ; ;僷僪儖儊儌偺妋擣 MEMO_DOT_CHECK: btfss PAD_MEMO,PAD_DOT ;僪僢僩偑墴偝傟偰偄傞偐丠 goto MEMO_DOT_CHECK_E call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,DOT_STA ;忬懺價僢僩偺怣崋晹暘張棟拞偵僙僢僩 call CW_ON ;俠倂怣崋俷俶 bsf RUN_MEMO,PAD_DOT ;僪僢僩張棟拞傪僙僢僩 bcf PAD_MEMO,PAD_DOT ;僪僢僩偑墴偝傟偰偄偨儊儌傪僋儕儎 MEMO_DOT_CHECK_E: return ;-------------------------------- MEMO_DAS_CHECK: btfss PAD_MEMO,PAD_DAS ;僟僢僔儏偑墴偝傟偰偄傞偐丠 goto MEMO_DAS_CHECK_E call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,DAS_STA ;忬懺價僢僩偺怣崋晹暘張棟拞偵僙僢僩 call CW_ON ;俠倂怣崋俷俶 bsf RUN_MEMO,PAD_DAS ;僟僢僔儏張棟拞傪僙僢僩 bcf PAD_MEMO,PAD_DAS ;僟僢僔儏偑墴偝傟偰偄偨儊儌傪僋儕儎 MEMO_DAS_CHECK_E: return ;------------------------------------------------------------------- ;---------------------------------------;仭 壗傕幚峴拞偱柍偄帪偵幚峴偡傞丅仭 ; 乮11=僟僢僔儏晞崋丄10=僪僢僩晞崋丄01=暥帤娫丄00=僗儁乕僗乯 ; ;俠倂僶僢僼傽乕僠僃僢僋 CB_CHECK: ;俠倂僶僢僼傽乕僠僃僢僋 movf CB_CW_CNT,F ;僛儘偐敾掕乮撪梕偵塭嬁偟側偄乯 btfsc STATUS,Z ;擖椡暥帤悢偑僛儘埲忋側傜 goto CB_CHECK_E ;偦偺傑傑儕僞乕儞偡傞丅goto call GET_BUF ;仧仧仧仧仧 movf CB_TMP,F ;00敾掕 btfss STATUS,Z ; goto CB_CHECK_2 ;師偺僠僃僢僋傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,BIT_SPC ;僗儁乕僗張棟拞偵僙僢僩 goto CB_CHECK_E ;--------------------------------------- CB_CHECK_2 movf CB_TMP,W ; sublw D'1' ;CB_TMP 偐傜 1 傪堷偄偰乮僗僉僢僾乯 btfss STATUS,Z ;僛儘側傜丠乮僗僉僢僾乯 goto CB_CHECK_3 ;師偺僠僃僢僋傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,BIT_MJK ;暥帤娫張棟拞偵僙僢僩 goto CB_CHECK_E ;--------------------------------------- CB_CHECK_3 movf CB_TMP,W ; sublw D'2' ;CB_TMP 偐傜 2 傪堷偄偰乮僗僉僢僾乯 btfss STATUS,Z ;僛儘側傜丠乮僗僉僢僾乯 goto CB_CHECK_4 ;師偺僠僃僢僋傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,DOT_STA ;忬懺價僢僩偺怣崋晹暘張棟拞偵僙僢僩 call CW_ON ;俠倂怣崋俷俶 bsf RUN_MEMO,PAD_DOT ;僪僢僩張棟拞傪僙僢僩 ;--------------------------------------- CB_CHECK_4 movf CB_TMP,W ; sublw D'3' ;CB_TMP 偐傜 3 傪堷偄偰乮僗僉僢僾乯 btfss STATUS,Z ;僛儘側傜丠乮僗僉僢僾乯 goto CB_CHECK_E ;師偺僠僃僢僋傊 call CNT_CLR ;僞僀儈儞僌僇僂儞僞僋儕儎乮弶婜壔乯 bsf RUN_MEMO,DAS_STA ;忬懺價僢僩偺怣崋晹暘張棟拞偵僙僢僩 call CW_ON ;俠倂怣崋俷俶 bsf RUN_MEMO,PAD_DAS ;僟僢僔儏張棟拞傪僙僢僩 CB_CHECK_E: return ;------------------------------------------------------------------- CW_ON: ;俲倕倷弌椡丂俷俶 bsf GPIO_OUT,LED_BIT call TM1_RESTART ;僞僀儅侾傪婲摦仛 goto IOPORT ;--------------------------------------- CW_OFF: ;俲倕倷弌椡丂俷俥俥 bcf GPIO_OUT,LED_BIT goto IOPORT ;--------------------------------------- IOPORT: ;僨乕僞弌椡 movf GPIO_OUT,W ;GPIO偵弌椡僨乕僞傪彂偔丅 movwf GPIO return ;------------------------------------------------------------------- TM1_RESTART: ;僞僀儅侾偺僗僞乕僩偍傛傃嵞僗僞乕僩仛 ;忋婰 CW_ON 偲妱傝崬傒張棟偱巊梡偡傞丅 ; CW_ON 偱婲摦偟偰丄妱崬傒張棟偺拞偱 ;僩僌儖摦嶌偲僗僩僢僾傪偡傞丅 bcf T1CON,TMR1ON ;仧僞僀儅侾傪巭傔傞丅 movlw DEF_TM1_STH ;MSB懁梡偺弶婜抣傪嵞愝掕乮僾儕僙僢僩乯 movwf TMR1H ;俵俽俛 懁傊彂偒崬傒丅 movlw DEF_TM1_STL ;LSB懁梡偺弶婜抣傪嵞愝掕乮僾儕僙僢僩乯 movwf TMR1L ;俴俽俛 懁傊彂偒崬傒丅 bsf T1CON,TMR1ON ;仧僞僀儅侾傪摦偐偡丅 ;仧僞僀儅侾偺僗僩僢僾偼妱傝崬傒張棟偺拞偱丄 ;GPIO_OUT,LED_BIT 偺忬懺傪妋擣偟幚巤偡傞丅仛 return ;------------------------------------------------------------------- ; ; 仧擖椡晞崋偼 CB_TMP 偵奿擺偟偰丄偙偺儖乕僠儞傪屇傃弌偡丅 ; CB_TMP 偼丄嵟壓埵懁偺俀價僢僩偵晞崋傪奿擺偡傞丅 ; 仭11=僟僢僔儏晞崋丄10=僪僢僩晞崋丄01=暥帤娫丄00=僗儁乕僗仭 ; ; 仧嵟弶偺屇傃弌偟帪偼buffer愭摢晹偺撪梕偑丄枹妋掕側偺偱丄 ; 婲摦屻偺儗僕僋儕儎偱徚偡丅 ; 仧CB_BIT_INPOS 偺弶婜抣偼丄侽偲偡傞丅 ; 仧CB_BIT_INPOS 偼丄俁乣侽 偺抣傪帩偭偰丄俁偼俵俽俛懁偺俀價僢僩偲偟丄 ; 丂丂丂丂丂丂丂丂丂侽偼丄俴俽俛懁偺俀價僢僩傊奿擺偡傞丅 ; ; 丂丂丂bit-> 76劆54劆32劆10 ; 丂丂丂POS-> 俁劆俀劆侾劆侽 ; ; 仧張棟偺嵟屻偵丄擖椡晞崋悢傪壛嶼偡傞丅 ; ; 乮儊僀儞儖乕僾偺摦偒傪暘偐傝傗偡偔偡傞偨傔偵僒僽儖乕僠儞壔偟偨丅乯 ;--------------------------------------- PUT_BUF: movf CB_BIT_INPOS,F ;價僢僩埵抲傪屇傃弌偟 ; ;僛儘偐傪敾掕 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto PUT_BUF_1 ; movf CB_TMP,W ; andlw B'00000011' ;嵟壓埵俀價僢僩 movwf CB_TMP ; goto PUT_BUF_E ;暅婣張棟傊 ;--------------------------------------- PUT_BUF_1: movf CB_BIT_INPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 1 ;埵抲 1 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto PUT_BUF_2 ; rlf CB_TMP,F ;俀夞丂嵍傊 rlf CB_TMP,F ; movf CB_TMP,W andlw B'00001100' ;壓埵俀價僢僩 movwf CB_TMP ; goto PUT_BUF_E ;暅婣張棟傊 ;--------------------------------------- PUT_BUF_2: movf CB_BIT_INPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 2 ;埵抲 2 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto PUT_BUF_3 ; rlf CB_TMP,F ;係夞丂嵍傊 rlf CB_TMP,F ; rlf CB_TMP,F ; rlf CB_TMP,F ; movf CB_TMP,W andlw B'00110000' ;忋埵懁俀價僢僩 movwf CB_TMP ; goto PUT_BUF_E ;暅婣張棟傊 ;--------------------------------------- PUT_BUF_3: movf CB_BIT_INPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 3 ;埵抲 3 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto PUT_BUF_4 ; rlf CB_TMP,F ;6夞丂嵍傊 rlf CB_TMP,F ; rlf CB_TMP,F ; rlf CB_TMP,F ; rlf CB_TMP,F ; rlf CB_TMP,F ; movf CB_TMP,W andlw B'11000000' ;嵟忋埵俀價僢僩 movwf CB_TMP ; goto PUT_BUF_E ;暅婣張棟傊 ;--------------------------------------- PUT_BUF_4: ;仧仧偙偺埵抲偵旘傃崬傫偱偔傞偙偲偼丄 ; ;敪惗偟側偄偼偢丅乮晄惓張棟乯 call TM0_CLR ;僞僀儅侽僋儕儎傊峴偭偰丄 goto PUT_BUF_END ;弶婜壔屻丄嵟弶偐傜奿擺偡傞丅 ; ;乮偼偒幪偰乯 ;--------------------------------------- PUT_BUF_E: movf CB_BYT_INPOS,W movwf FSR ;娫愙傾僪儗僗僙僢僩 movf CB_TMP,W ;埵抲偁傢偣傪偟偨僨乕僞傪屇傃弌偟丅 iorwf INDF,F ;DATA 憡懳傾僪儗僗 傊俷俼奿擺偡傞丅 incf CB_BIT_INPOS,F ;埵抲傪亄侾 movf CB_BIT_INPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 4 ;埵抲偑僆乕僶乕僼儘乕偐 btfss STATUS,Z ;係偩偭偨側傜僗僉僢僾 goto PUT_BUF_E2 ;係埲撪側偺偱僶僀僩埵抲偼偦偺傑傑 clrf CB_BIT_INPOS ;價僢僩埵抲傪僛儘偵 incf CB_BYT_INPOS,F ;僶僀僩埵抲傪亄侾 movlw CB_POS_END ;儗僕僗僞偺僄儞僪埵抲傪屇傃弌偟 subwf CB_BYT_INPOS,W ;擖椡乮奿擺乯偺傾僪儗僗偑 btfss STATUS,Z ;嵟廔傾僪儗僗傪挻偊偰偄側偄偐丠 goto PUT_BUF_E1 ;挻偊偰偄側偄丅GOTO movlw CB_POS_ST ;挻偊偨偺偱丄 movwf CB_BYT_INPOS ;僗僞乕僩傾僪儗僗傪僙僢僩 PUT_BUF_E1: movf CB_BYT_INPOS,W ;僶僀僩埵抲傪屇傃弌偟 movwf FSR ;娫愙傾僪儗僗僙僢僩 clrf INDF ;師偺奿擺埵抲傪僋儕儎偡傞丅 PUT_BUF_E2: incf CB_CW_CNT,F ;擖椡晞崋傪壛嶼 PUT_BUF_END: return ;------------------------------------------------------------------- ; ; 仧弌椡晞崋偼丄偙偺儖乕僠儞傪屇傃弌偟 CB_TMP 偵奿擺偟偰庢傝弌偡丅 ; CB_TMP 偼丄嵟壓埵懁偺俀價僢僩偵晞崋傪奿擺偡傞丅 ; 仭11=僟僢僔儏晞崋丄10=僪僢僩晞崋丄01=暥帤娫丄00=僗儁乕僗仭 ; ; 仧CB_BIT_OTPOS 偺弶婜抣偼丄侽偲偡傞丅 ; 仧CB_BIT_OTPOS 偼丄俁乣侽 偺抣傪帩偭偰丄俁偼俵俽俛懁偺俀價僢僩偲偟丄 ; 丂丂丂丂丂丂丂丂丂侽偼丄俴俽俛懁偺俀價僢僩傊奿擺偡傞丅 ; ; 丂丂丂bit-> 76劆54劆32劆10 ; 丂丂丂POS-> 俁劆俀劆侾劆侽 ; ; 仧張棟偺嵟屻偵丄擖椡晞崋悢傪尭嶼偡傞丅 ; ; 乮儊僀儞儖乕僾偺摦偒傪暘偐傝傗偡偔偡傞偨傔偵僒僽儖乕僠儞壔偟偨丅乯 ;--------------------------------------- ; GET_BUF: movf CB_BYT_OTPOS,W ;僶僀僩埵抲傪僙僢僩 movwf FSR ;娫愙傾僪儗僗僙僢僩 movf INDF,W ;娫愙屇傃弌偟丅 movwf CB_TMP ;晞崋乮暋悢乯傪堦帪奿擺 movf CB_BIT_OTPOS,F ;價僢僩埵抲傪屇傃弌偟 ; ;埵抲 0 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto GET_BUF_1 ; movf CB_TMP,W ;晞崋乮暋悢乯傪屇傃弌偟 andlw B'00000011' ;壓埵俀價僢僩巜掕 movwf CB_TMP ;堷搉偟埵抲乮俴俽俛乯偵僙僢僩 goto GET_BUF_E ;暅婣張棟傊 ;--------------------------------------- GET_BUF_1: movf CB_BIT_OTPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 1 ;埵抲 1 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto GET_BUF_2 ; rrf CB_TMP,F ; 2夞丂塃傊 rrf CB_TMP,F ; movf CB_TMP,W andlw B'00000011' ;壓埵俀價僢僩巜掕 movwf CB_TMP ;堷搉偟埵抲乮俴俽俛乯偵僙僢僩 goto GET_BUF_E ;暅婣張棟傊 ;--------------------------------------- GET_BUF_2: movf CB_BIT_OTPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 2 ;埵抲 2 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto GET_BUF_3 ; rrf CB_TMP,F ; 4夞丂塃傊 rrf CB_TMP,F ; rrf CB_TMP,F ; rrf CB_TMP,F ; movf CB_TMP,W andlw B'00000011' ;壓埵俀價僢僩巜掕 movwf CB_TMP ;堷搉偟埵抲乮俴俽俛乯偵僙僢僩 goto GET_BUF_E ;暅婣張棟傊 ;--------------------------------------- GET_BUF_3: movf CB_BIT_OTPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 3 ;埵抲 3 偐 btfss STATUS,Z ;摨悢側傜僗僉僢僾 goto GET_BUF_4 ; rrf CB_TMP,F ; 6夞丂塃傊 rrf CB_TMP,F ; rrf CB_TMP,F ; rrf CB_TMP,F ; rrf CB_TMP,F ; rrf CB_TMP,F ; movf CB_TMP,W andlw B'00000011' ;壓埵俀價僢僩巜掕 movwf CB_TMP ;堷搉偟埵抲乮俴俽俛乯偵僙僢僩 goto GET_BUF_E ;暅婣張棟傊 ;--------------------------------------- GET_BUF_4: ;仧仧偙偺埵抲偵旘傃崬傫偱偔傞偙偲偼丄 ; ;敪惗偟側偄偼偢丅乮晄惓張棟乯 call TM0_CLR ;僞僀儅侽僋儕儎傊峴偭偰丄 goto GET_BUF_END ;弶婜壔屻丄嵟弶偐傜張棟偡傞丅 ; ;乮偼偒幪偰乯 ;--------------------------------------- GET_BUF_E: incf CB_BIT_OTPOS,F ;埵抲傪亄侾 movf CB_BIT_OTPOS,W ;價僢僩埵抲傪屇傃弌偟 sublw 4 ;埵抲偑僆乕僶乕僼儘乕偐 btfss STATUS,Z ;係偩偭偨側傜僗僉僢僾 goto GET_BUF_E1 ;係埲撪側偺偱僶僀僩埵抲偼偦偺傑傑 clrf CB_BIT_OTPOS ;價僢僩埵抲傪僛儘偵 incf CB_BYT_OTPOS,F ;僶僀僩埵抲傪亄侾 movlw CB_POS_END ;儗僕僗僞偺僄儞僪埵抲傪屇傃弌偟 subwf CB_BYT_OTPOS,W ;擖椡乮奿擺乯偺傾僪儗僗偑 btfss STATUS,Z ;嵟廔傾僪儗僗傪挻偊偰偄側偄偐丠 goto GET_BUF_E1 ;挻偊偰偄側偄丅GOTO movlw CB_POS_ST ;挻偊偨偺偱丄 movwf CB_BYT_OTPOS ;僗僞乕僩傾僪儗僗傪僙僢僩 ;--------------------------------------- GET_BUF_E1: decf CB_CW_CNT,F ;仧擖椡暥帤悢傪尭嶼 GET_BUF_END: return ;------------------------------------------------------------------- data 'c','w','b','u','f','f','k','e','y',':' data 'V','2','.','0','0' data '(','C',')','2','0','0','6',' ','J','E','3','J','L','B' ;------------------------------------------------------------------- ; org 3FFH ;擮偺偨傔梡堄偟偰偄傞丄 ; dw 3468H ;僠僢僾屌桳偺僉儍儕僽儗俢俙俿俙丅 end------------------------------------------------------------------------丂
僜乕僗僼傽僀儖 cwbufkey2.asm (2006/08/06) 乮僾儖傾僢僾掞峈曄峏偺偨傔嵎偟懼偊傑偟偨丅2011/01/03乯
俫倕倶僼傽僀儖 cwbufkey2.hex (2006/08/06) 乮岆揧晅偺偨傔僼傽僀儖傪嵎偟懼偊傑偟偨丅2006/08/20乯
丂
丂