/************************************************
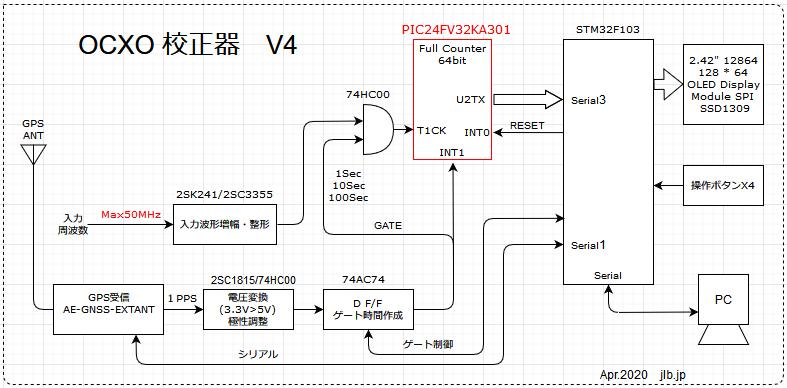
STM32F103 �ɂ��OCXO Calibrator
2020/03/28���
V3.0�̊�p
V4.0�̊�p STM_SSD1309_GPSFC_5V41.ino
(c)2020 jlb.jp
************************************************/
#include <Wire.h>
// I2C EEPROM �A�h���X
#define DEVICE_ADDRESS 0x50 //I2C EEPROM �X���[�u�A�h���X 24C256
#include <U8g2lib.h>
#include <SPI.h>
#include <wirish_time.h> // STM32
// #include <EEPROM.h> // STM32
#include "libmaple/timer.h" // STM32 GitHub ������A
/*
timer.h �t�@�C���́A
\Documents\ArduinoIDE1.8\hardware\Arduino_STM32\STM32F1\system\libmaple
\stm32f1\include\libmaple
�i\libmaple �t�H���_�͒lj��쐬�j
�ɕۑ������B
*/
// OLED SSD1309 Board Pin definitions [b4 AD9959 Signal]
#define SSD_SDA PA7 // Serial DATA Pin(out) SPI:MOSI [AD9959=IO0]
#define SSD_MISO PA6 // Serial DATA Pin(in) SPI:MISO [AD9959=IO2] not use
#define SSD_SCL PA5 // Serial DATA Pin(out) Low [AD9959=SCK]
#define SSD_CS PA4 // Chip Select Active Low(out) [AD9959=CSB]
#define SSD_RST PA3 // Reset(out) [AD9959=P3]
#define SSD_DC PA2 // Data/Command(out) [AD9959=P2]
//
U8G2_SSD1309_128X64_NONAME0_F_4W_HW_SPI u8g2(U8G2_R0, SSD_CS, SSD_DC, SSD_RST);
//
#define ADC_In PA0 // �A�i���O���̓s���̒�`�i�\���j ��V2.2:V3.0��
#define SWa_In PA1 // �R���g���[���r�v �A�i���O���̓s���̒�` ��V2.2:V3.0��
#define coGSET PA8 // Counter Gate Active High(out)Low edge
#define ciGATE PA15 // Counter Gate ON ��V2.2:V3.0��
#define coPicREST PB3 // Counter reset Active High(out) ��V4��
#define coRSET PB4 // Counter reset Active LOW(out) ��V41��
#define LED_OUT PB8 // Counter Input 1/16 Active Low edge(increment)
#define ciPPS PB9 // Counter Input 1sec Active High edge(increment)
#define LED_PIN PC13 // PC13 or 32 or D32
// ==============================================
// ������̃v���g�^�C�v�錾
void handle_timer1(void);
void handle_timer2(void);
void handle_timer3(void);
void Opening_Text(void);
void func_print(uint8_t, const char*);
void Text_setCursor(uint8_t, uint8_t);
void drawTxline(uint8_t);
int mid(char, char, int, int);
int cmmSTRcmm(char, char, int);
int8_t extractGPGGA(char*);
int8_t extractGNRMC(char*);
int8_t extractGPZDA(char*);
uint8_t jobSelect(uint8_t); // F0�L�[�ɂ��A�ݒ蓙�̏����I��
int8_t buttonSW(void); // M �{�^���̏�Ԃ�Ԃ�
uint8_t confPRMset(uint8_t, uint8_t); // PRM set
uint64_t hex16Bto64bit(uint64_t *, char * );
void dFRQtoStr(char, double); // ���g���̃t�H�[�}�b�g
void dFRQtoStrV(char, double); // ���g���̃t�H�[�}�b�g
//uint8_t write(uint16_t, uint8_t);
//uint8_t read(uint16_t);
void RegZero(void); // �J�E���^�[�p���W�X�^�̃[���N�����[
void PortReset(void); // �|�[�g�����Z�b�g���Q�[�gF/F�EPIC�J�E���^�l�̃��Z�b�g
void PicReset(void); // PIC��CPU���Z�b�g
void PpsSet(void); // �X�^�[�g�E���X�^�[�g���� PPS �Z�b�g
// ==============================================
// ==============================================
// �^�C�}�[���荞�݊W
volatile int32_t tIntCount1; // Timer1:�����݉�
volatile int32_t tIntCount2; // Timer1:�����݉�
volatile int32_t tIntCount3; // Timer3:�����݉iint���Ŏg�p=volatile ��t����j
// ==============================================
// �V���A����M�����W
uint8_t RXposi = 0;
uint8_t RCVok = 0;
uint8_t PICposi = 0;
uint8_t PICok = 0;
byte RXchar, PCchar, PICchar;
char RXbuff[256];
char RXbuff2[256];
char PICbuff[32]; // '[',16����,SUMx2,']'PIC����̃J�E���^�[�f�[�^���
char tmpbuff[64];
char useGPS[5];
char nowTime[22];
char nowDate[22];
char logdata[256];
char tmptmp[32];
// uint16_t SSt; // �L�[����p�ϐ�
int8_t Keycnt = 0;
uint8_t FuncEnable = 0; // Function �L�[�L���r�b�g F0:bit4, F1:bit3, F2:bit2, F3:bit1,
uint8_t jobPRM = 0; // �ҏW��ʂ̏���No
uint8_t bpsPRM = 0; // BPS�̎w��
uint8_t hostPRM = 0; // HOST�֑��o����f�[�^�I���@0:GPS Data, 1:LOG Data, 2:None
uint8_t gatePRM = 0; // GATE���Ԃ̎w��
uint8_t dispNo = 0; // �\���ԍ��@0:������ʂȂ�тɌv����, 1:�e�p�����[�^�\����
uint8_t Counting = 0; // �v���� = 1;
uint16_t gpsLoss = 0; // GPS�G���[��
uint16_t ppsLoss = 0; // PPS�M���Ԋu�̃G���[��
uint32_t CountTime = 0; // �v����
uint32_t picLoss = 0; // PIC�f�[�^��M�G���[��
// GPS�Ƃ̒ʐM���x�ύX�p�i�`�F�b�NSUM(27:2��)�́A�����l�j�@\r\n �́ASerial.println �ŕt������B
const char bps96set[] = "$PMTK251,9600*17"; // �i1�b���̃f�[�^��L�� 65.1%�j(default)
const char bps192set[] = "$PMTK251,19200*22"; // �i1�b���̃f�[�^��L�� 32.6%�j
const char bps384set[] = "$PMTK251,38400*27"; // �i1�b���̃f�[�^��L�� 16.3%�j
const char bps576set[] = "$PMTK251,57600*2C"; // �i1�b���̃f�[�^��L�� 10.9%�j20cm�Ŏ��X����H
const char bps1152set[] = "$PMTK251,115200*1F"; // �i1�b���̃f�[�^��L�� 5.4%�j���g�p���Ȃ���
const char hotStart[] = "$PMTK101*32"; // �R�[���h�X�^�[�g ANS="$PMTK809*33"
const char warmStart[] = "$PMTK102*31"; // ���[���X�^�[�g ANS="$PMTK809*33"
const char coldStart[] = "$PMTK103*30"; // �R�[���h�X�^�[�g ANS="$PMTK605*31"
// �J�E���^�[�p���W�X�^�H
volatile uint64_t ui64Reg = 0; // ��������(64bit) ���g���J�E���g�p
//uint64_t ui64PicReg = 0;
//uint64_t ui64tmp;
uint8_t sumchk;
double dFrqReg = 0; // ���������_(64bit) ���g���v�Z�p
double dAvgReg = 0; // ���������_(64bit) �A�x���[�W�v�Z�p
double dMaxReg = 0; // ���������_(64bit) �ō��l�ێ�
double dMinReg = 0; // ���������_(64bit) �ŏ��l�ێ�
double dTmpReg = 0; // ���������_(64bit) �ėp
double dP_PReg = 0; // ���������_(64bit) p-p �U�ꕝ
int16_t AddCnt = 0; // ���Z��
char fmtFrq[22];
double B4dFrqReg = 0; // ���������_(64bit) ���g���v�Z�p
float IncDec = 0; // �����v�Z�p
// �iint���Ŏg�p=volatile ��t����j
volatile int16_t ppsCnt = 0; // �Q�[�gON����PPS�J�E���g�p
uint8_t countDone = 0; // �J�E���g����
volatile uint8_t gateON = 0; // �Q�[�g�̏��
//uint8_t Running = 0; // �J�E���g��
volatile uint8_t reStart = 0; // PPS�M�������������Ƃ��̍ĊJ�t���O
char tmpsec[3] = "00"; // ���Վ����@�b�P�ʂł�LOG���M�Ɏg�p����B
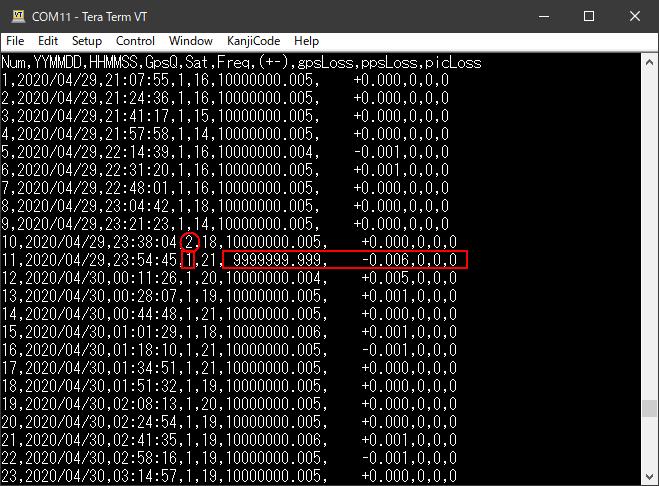
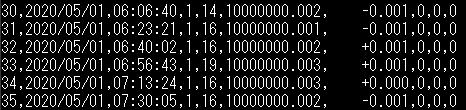
// CSV�̃w�b�_�[�i1�s�ځj�̃f�[�^��i2020/03/20 17:00 ���݁j
// Num=�A��, YYMMDD=�N����,HHMMSS=�����b ,GpsQ=QPS�i��, Sat=�g�p�q����,
// Freq=���g��, (+-)=�O��, gpsLoss=GPS�M�����X��, ppsLoss=PPS�M�����X��
const char logheader[] = "Num,YYMMDD,HHMMSS,GpsQ,Sat,Freq,(+-),gpsLoss,ppsLoss,picLoss";
// ������������������������������������������������������������������������
// �����������d���������̏�����ʁ���������
// ������������������������������������������������������������������������
//
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
void Opening_Text()
{
u8g2.clearBuffer(); // clear
Text_setCursor(0, 1); // ���E�s
u8g2.print("OCXO Calibrator (GPS)");
Text_setCursor(1, 2); // ���E�s
u8g2.print("V41 & Ver.0.04.29");
Text_setCursor(0, 3); // ���E�s
u8g2.print(" (c) 2020, jlb.jp ");
FuncEnable = B00001111;
func_print(0, "MENU");
func_print(1, "GATE");
func_print(2, "STRT");
func_print(3, "CngD");
u8g2.sendBuffer(); // OLED�ɑ��M�i�`�悷��j
}
// ������������������������������������������������������������������������
// �J�E���^�[�p���W�X�^�̃[���N�����[
// ������������������������������������������������������������������������
void RegZero() {
ui64Reg = 0;
dFrqReg = 0;
dAvgReg = 0;
dMaxReg = 0;
dMinReg = 0;
dTmpReg = 0;
dP_PReg = 0;
AddCnt = 0;
ppsCnt = 0;
gateON = 0;
gpsLoss = 0;
ppsLoss = 0;
tIntCount3 = 0;
//Running = 0; // ���g�p�H
B4dFrqReg = 0; // ���������_(64bit) ���g���v�Z�p
IncDec = 0; // �����v�Z�p
picLoss = 0; // PIC�f�[�^��M�G���[��
// �d�v�@����Ȃ���PIC����̌Â��f�[�^���c��ꍇ���L��B
while (Serial3.available()) {
PICchar = Serial3.read();
delay(2); // 9600bps����1����1.04mSsec
}
PICok = 0;
}
// GATE�pD-F/F�̃��Z�b�g V41���͔��](LOW �A�N�e�B�u)
void PortReset() {
digitalWrite(coRSET, LOW);
delay(1); // 1mS
digitalWrite(coRSET, HIGH);
delay(1); // 1mS
}
// PIC�̃��Z�b�g
void PicReset() {
digitalWrite(coPicREST, HIGH);
delay(1); // 1mS
digitalWrite(coPicREST, LOW);
delay(10); // 10mS
}
// ������������������������������������������������������������������������
// PPS ���荞�݂̃J�E���g
// ������������������������������������������������������������������������
void intPps() { // PPS ������
if (tIntCount3 >= 12) { // �O���PPS�M������1.2�b�ȏ�o�߂��Ă���B
digitalWrite(coGSET, LOW);
gateON = 0; // GATE�̏��OFF
reStart = 1; // PPS�M��������������̍ĊJ�t���O SET
} else {
// ���폈��
if (digitalRead(coGSET) == HIGH) {
gateON = 1; // GATE�̏��ON
// �ŏI��O��PPS(����PPS�ŃJ�E���g����)�Ȃ�AGSET��OFF����B
if (ppsCnt <= 1) digitalWrite(coGSET, LOW);
ppsCnt--;
} else {
gateON = 0; // GATE�̏��OFF
if (Counting == 1) countDone = 1; // �J�E���g����
ppsCnt = 0; // PPS Count Zero
// delay(1); // delay() �͋@�\���Ȃ��B
}
}
tIntCount3 = 0; // PPS�M���̊Ԋu���Ď�����J�E���^
}
// ������������������������������������������������������������������������
// PPS �p�����[�^�Z�b�g�@�������ʎg�p����
// ������������������������������������������������������������������������
void PpsSet() {
switch (gatePRM) {
case 1:
ppsCnt = 10; // 11�b�^��
break;
case 2:
ppsCnt = 100; // 1��41�b�^��
break;
case 3:
ppsCnt = 1000; // 16��41�b�^��
break;
case 4:
ppsCnt = 10000; // 2����46��41�b�^��
break;
default:
ppsCnt = 1;
break;
}
}
// ������������������������������������������������������������������������
// double �̐��l�����g���\�L�ɕϊ�����
//
// �����_�ȉ��̈ʂ�GATE���Ԃɉ����ĉ�(Variable)����(2020/04/15)
//
// 01234567890123456
// 98765432.1234 ----sprintf ��̏��
// 98 765 432.1234Hz ----�����ϊ���̃C���[�W
// 10MHz��܂ŕ\������B���̐擪��zero�̏ꍇ�͋B
// 3���J���}�͕t�����ɋB�����ȉ�4���܂ŁB
// ������������������������������������������������������������������������
void dFRQtoStrV(char* fmttmp, double freqIN) {
double dtmp;
char strtmp[22];
int8_t i, j, ln;
dtmp = freqIN;
switch (gatePRM) {
case 1:
sprintf(strtmp, "%10.1lf", dtmp);
break;
case 2:
sprintf(strtmp, "%11.2lf", dtmp);
break;
case 3:
sprintf(strtmp, "%12.3lf", dtmp);
break;
case 4:
sprintf(strtmp, "%13.4lf", dtmp);
break;
default:
sprintf(strtmp, "%10.1lf", dtmp);
strtmp[9] = ' ';
break;
}
ln = strlen(strtmp) + 2;
j = 0;
for (i = 0; i < ln; i++) {
switch (i) {
case 2:
case 5:
fmttmp[j] = ' ';
j++;
fmttmp[j] = strtmp[i];
j++;
break;
default:
fmttmp[j] = strtmp[i];
j++;
break;
}
}
fmttmp[15] = 0x0;
}
// ������������������������������������������������������������������������
// double �̐��l�����g���\�L�ɕϊ�����
//
// �A�x���[�W�̕\����p�ɂ���(2020/04/15)
//
// 01234567890123456
// 98765432.1234 ----sprintf ��̏��
// 98 765 432.1234Hz ----�����ϊ���̃C���[�W
// 10MHz��܂ŕ\������B���̐擪��zero�̏ꍇ�͋B
// 3���J���}�͕t�����ɋB�����ȉ�4���܂ŁB
// ������������������������������������������������������������������������
void dFRQtoStr(char* fmttmp, double freqIN) {
double dtmp;
char strtmp[22];
int8_t i, j, ln;
dtmp = freqIN;
sprintf(strtmp, "%13.4lf", dtmp);
ln = strlen(strtmp) + 2;
j = 0;
for (i = 0; i < ln; i++) {
switch (i) {
case 2:
case 5:
fmttmp[j] = ' ';
j++;
fmttmp[j] = strtmp[i];
j++;
break;
default:
fmttmp[j] = strtmp[i];
j++;
break;
}
}
fmttmp[15] = 0x0;
}
/*************************************************************
��M���������f�[�^(SUM�t)�� uint64_t �ɕϊ����ASUM Check ������B
�߂�l uint64_t <== char inHex[20];
������SUM Check�̌���(sumFlag)��߂����߁A�A�h���X�n���Ŋ����`
�g�p���́A'&' ��t����B�@hex16Bto64bit( &sumFlag, char *inHex)
sumFlag = 0;�G���[�Ȃ�
sumFlag = 1;�G���[�L��i�����͂��Ȃ��\�z�j
*************************************************************/
uint64_t hex16Bto64bit( uint8_t * sumFlag, char *inHex) {
int8_t i;
uint8_t tmpB1, tmpB2, tmpsum = 0;
uint64_t out64val = 0;
uint16_t sum = 0;
for (i = 15; i >= 0; i--) { // �����z��̌ォ����o��
tmpB1 = inHex[i];
sum += tmpB1;
if (tmpB1 > 0x39) {
tmpB2 = tmpB1 - 55;
tmpB2 &= 0x0F;
} else {
tmpB2 = tmpB1 & 0x0F;
}
out64val = out64val << 4;
out64val = out64val | tmpB2;
}
for (i = 17; i >= 16; i--) { // Check Sum
tmpB1 = inHex[i];
if (tmpB1 > 0x39) {
tmpB2 = tmpB1 - 55;
tmpB2 &= 0x0F;
} else {
tmpB2 = tmpB1 & 0x0F;
}
tmpsum <<= 4;
tmpsum |= tmpB2;
}
if (tmpsum == (uint8_t)sum) { // LSB��8bit���ƍ�
*sumFlag = 0;
} else {
*sumFlag = 1;
}
return out64val;
}
////////////////////////////////////////////////////////////
// ������������������������������������������������������������������������
// ������������������������������������������������������������������������
// �����������^�C�}�[�����݁���������
// 0.1�b���Ƃɐ�������@�@
// OLED �̕\���T�C�N���p�Ɏg�p����@ 0.01Sec(timer1)
// PPS�M���������������Ƃ̌��o�Ɏg�p����B 0.1Sec(timer3)
// ������������������������������������������������������������������������
// ������������������������������������������������������������������������
void handle_timer1() {
tIntCount1++;
if (tIntCount1 > 500) tIntCount1 = 0; // 500 x 0.01S = 5 Sec �ȏ�̓N���A�[
}
void handle_timer2() {
tIntCount2++; // 1mSec���ɃJ�E���g
if (tIntCount2 > 5000) tIntCount2 = 0; // 5000 x 1mS = 5 Sec �ȏ�̓N���A�[
}
void handle_timer3() {
if (gateON == 1) tIntCount3++; // GATE��ON�̊ԁA0.1Sec���ɃJ�E���g
}
// ������������������������������������������������������������������������
// ������������������������������������������������������������������������
//
// ����������������������������������������������������������
// ����������������������������������������������������������
// ����������������������������������������������������������
// ����������������������������������������������������������
// ����������������������������������������������������������
// ����������������������������������������������������������
// ����������������������������������������������������������
//
// ������������������������������������������������������������������������
// ������������������������������������������������������������������������
void setup(void) {
disableDebugPorts(); // JTAG_Debug ���g��Ȃ����ƂŁAPA15,PB3,PB4���g����悤�ɂ���B
pinMode(ADC_In, INPUT_ANALOG);
pinMode(SWa_In, INPUT_ANALOG);
// pinMode(ciCOUNT_T, INPUT_PULLUP); // ��V2.2:�lj���
pinMode(coGSET, OUTPUT);
pinMode(ciGATE, INPUT);
pinMode(coPicREST, OUTPUT); // PIC AllRESET
pinMode(coRSET, OUTPUT); // Device Regi RESET
// pinMode(ciCOUNT, INPUT);
// #define ciCOUNT_T PA1 // Counter Input Timer2(TIM2_CH2) ��V2.2:�lj���
pinMode(ciPPS, INPUT);
pinMode(LED_PIN, OUTPUT);
pinMode(LED_OUT, OUTPUT);
digitalWrite(LED_PIN, HIGH);
digitalWrite(LED_OUT, HIGH);
digitalWrite(coGSET, LOW);
PortReset(); // GATE�pD-F/F�̏�����
PicReset(); // PIC�̏�����
attachInterrupt(ciPPS, intPps, RISING); // PPS ���荞�݊��̎w��BRISING
// attachInterrupt(ctQ7, intPictest, FALLING); // �Վ��e�X�g
RegZero(); // ���W�X�^�[�̏�����
SPI.begin();
u8g2.begin();
// u8g2.setFont(u8g2_font_6x12_tr); // 7bit �����A21�����A5�s(�s12dot)�A�������ꂪ�ǂ���������
u8g2.setFont(u8g2_font_6x12_t_symbols); // ?�L�����g�p���邽�߂ɁA������̃t�H���g���g���B
u8g2.setFontMode(1); /* activate transparent font mode */
Wire.begin(); // I2C EEPROM�p�A��
Opening_Text(); // ������ʂ�\��
// ������������������������������
// EEPROM�ǂݏo���E������
// ������������������������������
uint8_t tmp;
tmp = read(0); // ROM����̓ǂݏo�� Address = 0
if (tmp >= 0 && tmp <= 2) { // �p�����[�^���͈͓� 0 �` 2
bpsPRM = tmp; // = PRM�֓ǂݏo���l�Z�b�g
} else { // �p�����[�^���͈͊O = ROM�V�i�܂��́A�̏�??
write(0, 0); // 0 = (default) ��������
}
tmp = read(1); // ROM����̓ǂݏo�� Address = 1
if (tmp >= 0 && tmp <= 2) {
hostPRM = tmp;
} else {
write(1, 0);
}
tmp = read(2); // ROM����̓ǂݏo�� Address = 2
if (tmp >= 0 && tmp <= 2) {
gatePRM = tmp;
} else {
write(2, 0);
}
// ������������������������������
// �������^�C�}�[������ 1 �̏����ݒ� START�������������������@OLED�̕\���T�C�N���p
Timer1.pause(); // �^�C�}�[��~
Timer1.setPrescaleFactor(7200); // �����lset 72MHz �� 7200 = 10KHz
Timer1.setOverflow(100); // 10KHz x 100 = 0.01�b�ŃI�[�o�[�t�H���[������
// ------
Timer1.attachInterrupt( // ���荞�݃n���h���̓o�^
TIMER_UPDATE_INTERRUPT, // �����́A�J�E���^�[�I�[�o�[�t���[�X�V��
handle_timer1); // �Ăяo����
// ------
Timer1.setCount(0); // �J�E���^��0�ɐݒ�
Timer1.refresh(); // �^�C�}�X�V
Timer1.resume(); // �^�C�}�[�X�^�[�g
// --------------------------------------
// �������^�C�}�[������ �Q �̏����ݒ� START�������������������@�i�������Ԃ̌v���ɗՎ��g�p�j�ėp
Timer2.pause(); // �^�C�}�[��~
Timer2.setPrescaleFactor(7200); // �����lset 72MHz �� 7200 = 10KHz (uint32)
Timer2.setOverflow(10); // 10KHz x 10 = 1mSsec�ŃI�[�o�[�t�H���[������ (uint32)
// ------
Timer2.attachInterrupt( // ���荞�݃n���h���̓o�^
TIMER_UPDATE_INTERRUPT, // �����́A�J�E���^�[�I�[�o�[�t���[�X�V��
handle_timer2); // �Ăяo����
// ------
Timer2.setCount(0); // �J�E���^��0�ɐݒ�
Timer2.refresh(); // �^�C�}�X�V
Timer2.resume(); // �^�C�}�[�Q�X�^�[�g
// �������^�C�}�[�����݂̏����ݒ� END ������������������
// --------------------------------------
// --------------------------------------
// �������^�C�}�[������ 3 �̏����ݒ� START�������������������@PPS�M���̌������m�p
Timer3.pause(); // �^�C�}�[��~
Timer3.setPrescaleFactor(7200); // �����lset 72MHz �� 7200 = 10KHz (uint32)
Timer3.setOverflow(1000); // 10KHz x 1000 = 0.1�b�ŃI�[�o�[�t�H���[������ (uint16)
// ------
Timer3.attachInterrupt( // ���荞�݃n���h���̓o�^
TIMER_UPDATE_INTERRUPT, // �����́A�J�E���^�[�I�[�o�[�t���[�X�V��
handle_timer3); // �Ăяo����
// ------
Timer3.setCount(0); // �J�E���^��0�ɐݒ�
Timer3.refresh(); // �^�C�}�X�V
Timer3.resume(); // �^�C�}�[�Q�X�^�[�g
// �������^�C�}�[�����݂̏����ݒ� END ������������������
// --------------------------------------
Serial.begin(9600); // USB�V���A��(PC��) STM32�́A���x�w�肵�Ă��ō����x�œ����B
//while (!Serial); // Arduino UNO �������USB�V���A���̉����҂B
//while (!Serial.isConnected()) delay(10); // STM32 USB-�V���A���p isConnected()���g���B
// ������ROM���烊�[�h����bps���Z�b�g�@GNSS�p
switch (bpsPRM) {
case 1:
Serial1.begin(19200); // Serial1(PA9 PA10)
break;
case 2:
Serial1.begin(38400); // Serial1(PA9 PA10)
break;
default:
Serial1.begin(9600); // Serial1(PA9 PA10)
break;
}
Serial3.begin(38400); // PIC���ƍ��킹��
delay(3000);
}
// ������������������������������������������������������������������������
//
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
// ����������������������������������������������
//
// ������������������������������������������������������������������������
// Loop���̏������ԁi�^�C�}�[�Ŏ���:2020/04/17�j
// �X�^���o�C���FMax16mS(1mS�`12mS)
// �X�^�[�g���@�FMax194mS
// �v�����@�@�@�FMax16mS(1mS�`15mS)
// �X�g�b�v���@�FMax239mS
// ������������������������������������������������������������������������
void loop(void) {
// digitalWrite(LED_PIN, !digitalRead (ciPPS)); // LED_PIN �� PPS���͂ɓ���������
digitalWrite(LED_OUT, !digitalRead (ciPPS)); // LED_PIN �� PPS���͂ɓ���������
switch (buttonSW()) { // �L�[��������Ă��邩�m�F�B
// �p�����[�^�ҏW���j���[��
case 10: // ������(20)F0 ===>�Z����(10)�֕ύX(2020/04/16)
if ((FuncEnable & 0x08) > 0) { // ���t���O
jobPRM = jobSelect(jobPRM); // �������ݒ菈�����̑I����ʂɍs��
u8g2.clearBuffer(); // �������ݒ菈�����̑I����ʂ���̋A��ɃN���A�[
Text_setCursor(1, 1); // ���E�s
u8g2.print(" Config MENU END ");
u8g2.sendBuffer(); // OLED�ɑ��M�i�`�悷��j
delay(500);
}
break;
// GATE time�؊�
case 11: // �Z����F1�A�������͖����Ƃ��ď����B
if ((FuncEnable & 0x04) > 0) { // ���t���O
if (dispNo == 0) {
gatePRM++;
if (gatePRM > 3) gatePRM = 0; // GATE time ��ύX�A�ʏ�0�`3
} else {
// CLEAR ��Q���
PicReset(); // PIC�����Z�b�g����B�iINT0���荞�݂Łj
delay(1);
}
}
break;
// GATE time�؊�
case 21: // ������F1�ŁA10,000sec�̐ݒ�
if ((FuncEnable & 0x04) > 0) { // ���t���O
if (dispNo == 0) {
gatePRM = 4;
}
}
break;
// �v���X�^�[�g�E�X�g�b�v
case 12: // �Z����F2�A�������͖����Ƃ��ď����B
if ((FuncEnable & 0x02) > 0) { // ���t���O
if (Counting == 0) {
Counting = 1; // �J�E���g�X�^�[�g
RegZero();
PortReset();
PicReset();
// �Q�[�g���Ԃɂ��A
PpsSet(); // gatePRM����ppsCnt�֎��Ԃ��Z�b�g
digitalWrite(coGSET, HIGH);
} else {
digitalWrite(coGSET, LOW);
Counting = 0; // �J�E���g�X�g�b�v
CountTime = 0;
delay(50);
}
}
break;
// �\����ʂ̐ؑ�
case 13: // �Z����F3�A�������͖����Ƃ��ď����B
if ((FuncEnable & 0x01) > 0) { // ���t���O
if (dispNo == 0) {
dispNo = 1; // 2��ʂ֕ύX
} else {
dispNo = 0; // 1��ʂ֕ύX
}
}
break;
} // switch() end
// �����������APPS�M�������������Ƃ��̍ĊJ�t���O����������B������
if (reStart != 0) {
ppsLoss++; // PPS�̃��X���{�P
PortReset(); // GATE�pD-F/F�̃��Z�b�g
PpsSet(); // gatePRM����ppsCnt�֎��Ԃ��Z�b�g
ui64Reg = 0; // �N�����[
reStart = 0;
digitalWrite(coGSET, HIGH);
}
// ������PPS�������Ԓ�~�����Ƃ��̃J�E���g������~������
if (tIntCount3 > 200000) { // �^�C�}�[���荞�� 100mS * 20000 = 20000S(��33.3��) ��
// �J�E���g�������~����B�iPPS�M������33.3�����B���Ȃ������j
digitalWrite(coGSET, LOW);
Counting = 0; // �J�E���g�X�g�b�v
gateON = 0;
tIntCount3 = 0;
}
// --------------------------------------
if (Serial1.available()) { // ��Serial1(PA9 PA10)����USB�V���A��(PC��)��
RXchar = Serial1.read();
switch (RXposi) {
case 0:
if (RXchar == '$')
{
RXbuff[RXposi] = RXchar;
RXposi++;
} else {
RXposi = 0;
RCVok = 0;
}
break;
case 255: // �o�b�t�@�� 255 ��t�Ȃ�f���̂Ă�
RXposi = 0;
RCVok = 0;
break;
default:
if (RXchar == 0x0a) // �G���h�}�[�N�Ȃ� '*'���� <lf>0x0a
{
RXbuff[RXposi] = 0x00; // �����z���0x00����������
RCVok = 1;
RXposi = 0;
} else {
RXbuff[RXposi] = RXchar; // ����ȊO�Ȃ� RXbuff[] �Ɏ�荞��
RXposi++;
}
}
if (hostPRM == 0) { // 0:�f�o�r�f�[�^���t������
Serial.write(RXchar);
}
}
// --------------------------------------
if (RCVok == 1)
{
Text_setCursor(1, 3); // ���E�s
u8g2.print(RXbuff);
if (strncmp(RXbuff, "$GPGGA", 6) == 0) {
strcpy(RXbuff2, RXbuff);
extractGPGGA(RXbuff2); // GPS���𒊏o
}
if (strncmp(RXbuff, "$GPZDA", 6) == 0) {
strcpy(RXbuff2, RXbuff);
extractGPZDA(RXbuff2); // UTC�ƔN�����𒊏o����JST�ɕϊ�����
}
RCVok = 0;
}
// --------------------------------------
if (Serial.available()) { // ��USB�V���A��(PC��)����Serial1(PA9 PA10)��
PCchar = Serial.read();
Serial1.write(PCchar);
}
// --------------------------------------
if (Serial3.available()) { // ��Serial3(PB11)����J�E���^�[�f�[�^��恡
PICchar = Serial3.read();
switch (PICposi) {
case 0:
if (PICchar == '[') // '['= START Mark
{
PICposi++;
} else {
PICposi = 0;
PICok = 0;
}
break;
case 19:
if (PICchar == ']') // 0���琔����19�Ԗڂ� ']'= END Mark�@�Ȃ琳��
{
PICbuff[PICposi - 1] = 0x00;
PICok = 1;
}
PICposi = 0;
break;
default:
if (PICchar != ']') // ']'= END Mark �ȊO�Ȃ�
{
PICbuff[PICposi - 1] = PICchar;
PICposi++;
} else {
PICposi = 0;
PICok = 0;
}
break;
}
// ������������������������������������������������������������
if (hostPRM == 2) { // 2:PIC�f�[�^��HOST�֑��M�����ԁ��e�X�g��
Serial.write(PICchar);
}
// ������������������������������������������������������������
}
// --------------------------------------
// ���������������g���J�E���g�������������̏���������������
// ���������������g���J�E���g�������������̏���������������
// ���������������g���J�E���g�������������̏���������������
// ���������������g���J�E���g�������������̏���������������
// ���������������g���J�E���g�������������̏���������������
// ���������������g���J�E���g�������������̏���������������
if (countDone == 1 && PICok == 1) {
CountTime++; // �v����
// (sumchk != 0) SUM Check Error
// 1�`2cm�Ԃ̓`���H�̂��߁A�����\���̓[���ɋ߂��Ǝv���邽��
// SUM Check Error ���̏����͋L�q�����B(2020/04/10)
// ���̂܂������āApicLoss �����Z����B
ui64Reg = hex16Bto64bit(&sumchk, PICbuff);
if (sumchk > 0) picLoss++; // ��������������A���O���ւ̈����n���̂�
dFrqReg = (double)ui64Reg; // double �ɕϊ�
ui64Reg = 0; // �N�����[
// �Q�[�g���Ԃɂ��A
switch (gatePRM) {
case 1:
dFrqReg = dFrqReg / 10;
break;
case 2:
dFrqReg = dFrqReg / 100;
break;
case 3:
dFrqReg = dFrqReg / 1000;
break;
case 4: // �����I�ȁi�ʏ�͑I���ł��Ȃ��j����
dFrqReg = dFrqReg / 10000;
break;
default:
break;
}
// �A�x���[�W�ɉ��Z
dAvgReg += dFrqReg;
AddCnt++;
// �ō��l�̍X�V
if (dMaxReg < dFrqReg) dMaxReg = dFrqReg;
// �Œ�l�̍X�V
if (dMinReg != 0) {
if (dMinReg > dFrqReg) dMinReg = dFrqReg;
} else {
dMinReg = dFrqReg;
}
// �U�ꕝ p-p �̍X�V
dP_PReg = dMaxReg - dMinReg;
// ������������������������������������������������
// ��O�̑��茋�ʂƂ̌덷�����߂�B
// ������������������������������������������������
if (B4dFrqReg == 0) {
B4dFrqReg = dFrqReg;
IncDec = 0;
} else {
IncDec = dFrqReg - B4dFrqReg;
B4dFrqReg = dFrqReg;
}
PICok = 0; // Serial3����̓ǂݍ��݂��N�����[
countDone = 0; // ���g���J�E���g�������������̏���������������
if (Counting == 1) { // �J�E���g�p�����Ȃ�
// �Q�[�g���Ԃɂ��A
PpsSet(); // gatePRM����ppsCnt�֎��Ԃ��Z�b�g
PortReset(); // GATE�pD-F/F�̃��Z�b�g
digitalWrite(coGSET, HIGH); // �J�E���g�̌p���Z�b�g
}
// ������������������������������������������������
// �J�E���g�������ƂɁA�iLOG�w��Ȃ�jLOG�o��
// ������������������������������������������������
if (hostPRM == 1) { // 1:�k�n�f�f�[�^��HOST�֑��M�����ԁ��e�X�g��
if (CountTime == 1 ) { // �����v��1��ڂȂ�
Serial.println(logheader); // <cr><lf>��t���ăw�b�_�[�o��
}
sprintf(tmptmp, "%d", CountTime);
strcpy(logdata, tmptmp);
strcat(logdata, ",");
strcat(logdata, nowDate);
strcat(logdata, ",");
strcat(logdata, nowTime);
strcat(logdata, ",");
strcat(logdata, useGPS);
strcat(logdata, ",");
switch (gatePRM) { // GATE���Ԃɉ����ď����_�ȉ�������(2020/04/29)
case 1:
sprintf(tmptmp, "%10.1lf", dFrqReg);
break;
case 2:
sprintf(tmptmp, "%11.2lf", dFrqReg);
break;
case 3:
sprintf(tmptmp, "%12.3lf", dFrqReg);
break;
case 4:
sprintf(tmptmp, "%13.4lf", dFrqReg);
break;
default:
sprintf(tmptmp, "%8.0lf", dFrqReg);
break;
}
strcat(logdata, tmptmp);
strcat(logdata, ",");
// sprintf(tmptmp, "%+10.4f", IncDec); // + - �L���t���A�����ȉ�3���A�v�W��
switch (gatePRM) { // GATE���Ԃɉ����ď����_�ȉ�������(2020/04/29)
case 1:
sprintf(tmptmp, "%+8.1f", IncDec);
break;
case 2:
sprintf(tmptmp, "%+9.2f", IncDec);
break;
case 3:
sprintf(tmptmp, "%+10.3f", IncDec);
break;
case 4:
sprintf(tmptmp, "%+11.4f", IncDec);
break;
default:
sprintf(tmptmp, "%+6.0f", IncDec);
break;
}
strcat(logdata, tmptmp);
strcat(logdata, ",");
sprintf(tmptmp, "%d", gpsLoss);
strcat(logdata, tmptmp);
strcat(logdata, ",");
sprintf(tmptmp, "%d", ppsLoss);
strcat(logdata, tmptmp);
strcat(logdata, ",");
sprintf(tmptmp, "%d", picLoss); // PIC�f�[�^��SUM Check�G���[�� �f�o�b�O�p
strcat(logdata, tmptmp);
Serial.println(logdata); // <cr><lf>��t���ďo��
}
} // ���������������g���J�E���g�����������@�I���@������������
// --------------------------------------
// ������������������������������������������������
// OLED�ւ̕\������
// ������������������������������������������������
if (tIntCount1 >= 20) { // �^�C�}�[���荞�� 10mS * 20 = 200mS ���ɕ\�����X�V����B��������
// *100mS ���ł��x��͖����͗l�B memo->( digitalRead(ciGON) == LOW && )
tIntCount1 = 0;
u8g2.clearBuffer(); // clear the internal memory
if (dispNo == 0) { // ��{���
Text_setCursor(0, 0); // ���E�s
u8g2.print("Frq:");
dFRQtoStrV(fmtFrq, dFrqReg); // ���g���f�[�^��\���`���ɕϊ�
Text_setCursor(4, 0); // ���E�s
u8g2.print(fmtFrq);
Text_setCursor(19, 0); // ���E�s
u8g2.print("Hz");
Text_setCursor(0, 1); // ���E�s
u8g2.print(useGPS);
Text_setCursor(4, 1); // ���E�s
u8g2.print(",g");
Text_setCursor(6, 1); // ���E�s
u8g2.print(gpsLoss);
u8g2.print(",p");
u8g2.print(ppsLoss); // PS�M�������������Ƃ��@�@�@�f�o�b�O�p
Text_setCursor(13, 1); // ���E�s
u8g2.print(nowTime);
Text_setCursor(1, 2); // ���E�s
u8g2.print("GATE=");
Text_setCursor(6, 2); // ���E�s
switch (gatePRM) {
case 1:
u8g2.print("10s");
break;
case 2:
u8g2.print("100s");
break;
case 3:
u8g2.print("1000s");
break;
case 4: // �����I�Ȉ����i�������őI���j
u8g2.print("10^4s"); // �\�������ߖ�̂��� 10��4�� �\�L
break;
default:
u8g2.print("1s");
break;
}
sprintf(tmptmp, "%5d", CountTime); // �v���i�ŏ�55���ԘA���ŃJ�E���g�ł��錅���j
Text_setCursor(11, 2); // ���E�s
u8g2.print(tmptmp);
sprintf(tmptmp, "%5d", ppsCnt); // GATE��OFF����܂ł� pps��
Text_setCursor(16, 2); // ���E�s
u8g2.print(tmptmp);
Text_setCursor(1, 3); // ���E�s
u8g2.print("SEND=");
Text_setCursor(6, 3); // ���E�s
switch (hostPRM) {
case 0:
u8g2.print("GPS");
break;
case 1:
u8g2.print("LOG");
break;
case 2:
u8g2.print("PIC");
break;
}
// �������@�ύX�����p�����[�^��\������B�f�o�b�O�p
char aa = 0x30 | jobPRM;
char bb = 0x30 | bpsPRM;
char cc = 0x30 | hostPRM;
char dd = 0x30 | gatePRM;
Text_setCursor(10, 3); // ���E�s
// u8g2.print(aa);
u8g2.print(bb);
u8g2.print(cc);
u8g2.print(dd);
// ************************************************************************
//sprintf(tmptmp, "%2d", tIntCount3); // PPS�M���̊Ԋu(0.1Sec�P��)�f�o�b�O�p
//Text_setCursor(14, 3); // ���E�s
// u8g2.print(tmptmp);
// ************************************************************************
sprintf(tmptmp, "%2d", picLoss); // PIC�f�[�^�̃V���A����M�G���[�� �f�o�b�O�p
Text_setCursor(19, 3); // ���E�s
u8g2.print(tmptmp);
if (Counting == 0) { // ��~��
FuncEnable = B00001111;
func_print(0, "MENU");
func_print(1, "GATE");
func_print(2, "STRT");
func_print(3, "CngD");
} else { // �J�E���g��
FuncEnable = B00000011;
func_print(2, "STOP");
func_print(3, "CngD");
}
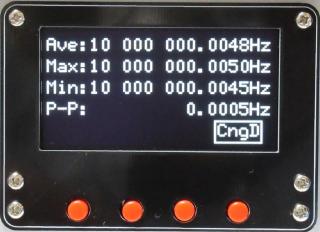
} else { // �g���@��Q��ʁ���������������
//
Text_setCursor(0, 0); // ���E�s
u8g2.print("Ave:");
if (AddCnt > 0) {
dTmpReg = dAvgReg / (double)AddCnt;
dFRQtoStr(fmtFrq, dTmpReg); // ���g���f�[�^��\���`���ɕϊ�
Text_setCursor(4, 0); // ���E�s
u8g2.print(fmtFrq);
}
Text_setCursor(19, 0); // ���E�s
u8g2.print("Hz");
//
Text_setCursor(0, 1); // ���E�s
u8g2.print("Max:");
dFRQtoStrV(fmtFrq, dMaxReg); // ���g���f�[�^��\���`���ɕϊ�
Text_setCursor(4, 1); // ���E�s
u8g2.print(fmtFrq);
Text_setCursor(19, 1); // ���E�s
u8g2.print("Hz");
//
Text_setCursor(0, 2); // ���E�s
u8g2.print("Min:");
dFRQtoStrV(fmtFrq, dMinReg); // ���g���f�[�^��\���`���ɕϊ�
Text_setCursor(4, 2); // ���E�s
u8g2.print(fmtFrq);
Text_setCursor(19, 2); // ���E�s
u8g2.print("Hz");
//
Text_setCursor(0, 3); // ���E�s
u8g2.print("P-P:");
dFRQtoStrV(fmtFrq, dP_PReg); // ���g���f�[�^��\���`���ɕϊ�
Text_setCursor(4, 3); // ���E�s
u8g2.print(fmtFrq);
Text_setCursor(19, 3); // ���E�s
u8g2.print("Hz");
if (Counting == 0) { // ��~��
FuncEnable = B00000101;
func_print(1, "pCLR");
func_print(3, "CngD");
} else { // �J�E���g��
FuncEnable = B00000001;
func_print(3, "CngD");
}
}
// ������������������������������������������������
u8g2.sendBuffer(); // OLED�ɑ��M�i�`�悷��j
/////////////////////////////////////
}
} // Loop End
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
// ������������������������������������������������������������������������
// �u�t�@���N�V�����v�\����
// �\����̍ʼn��s�̓t�@���N�V�����\���G���A�Ƃ��āA�S�̃{�^���Ɋ��蓖�Ă�B
// ��̃{�^���͂S�����ŁA��1����������Box�`��Ŕ��]�\������B
// fnmb : �{�^���ԍ�
// str : �\�������i4�����ȓ��j
// ������������������������������������������������������������������������
void func_print(uint8_t fnmb, const char* str)
{
int8_t boxORframe = 1; // 0 = Box�`��, 1 = �t���[���`��@�ؑ֗\��
int8_t len;
len = strlen(str);
if ((len == 0) || (len > 4)) return;
switch (fnmb) {
case 0:
u8g2.setDrawColor(1); // ���]�p�̏����̂���
if (boxORframe == 0) u8g2.drawBox(5, 50, 27, 13); // Box�`��
else
u8g2.drawFrame(5, 50, 27, 13); // �t���[���`��
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(1, 4); // ���E�s
u8g2.print(str);
// u8g2.drawLine(6, 63, 31, 63); // (x1, y1, x2, y2)
break;
case 1:
u8g2.setDrawColor(1); // ���]�p�̏����̂���
if (boxORframe == 0) u8g2.drawBox(35, 50, 27, 13); // Box�`��
else
u8g2.drawFrame(35, 50, 27, 13);
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(6, 4); // ���E�s
u8g2.print(str);
// u8g2.drawLine(36, 63, 61, 63); // (x1, y1, x2, y2)
break;
case 2:
u8g2.setDrawColor(1); // ���]�p�̏����̂���
if (boxORframe == 0) u8g2.drawBox(65, 50, 27, 13); // Box�`��
else
u8g2.drawFrame(65, 50, 27, 13);
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(11, 4); // ���E�s
u8g2.print(str);
// u8g2.drawLine(66, 63, 91, 63); // (x1, y1, x2, y2)
break;
case 3:
u8g2.setDrawColor(1); // ���]�p�̏����̂���
if (boxORframe == 0) u8g2.drawBox(95, 50, 27, 13); // Box�`��
else
u8g2.drawFrame(95, 50, 27, 13);
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(16, 4); // ���E�s
u8g2.print(str);
// u8g2.drawLine(96, 63, 121, 63); // (x1, y1, x2, y2)
break;
}
}
// ������������������������������������������������������������������������
// �����o�͂̈ʒu���A�����P�ʂŎw�肷��B
// ���オ�O�J�����̂O�s�i���v�F21����x5�s�j
// �ΏۂƂ���t�H���g�F u8g2.setFont(u8g2_font_6x12_mf);
// ��1�����ڂ̍�1�h�b�g�́A��B
// cc : ���@0����20
// ll : �s�@0����4
// ������������������������������������������������������������������������
void Text_setCursor(uint8_t cc, uint8_t ll) // cc:0 to 20, ll:0 to 4 Use
{
uint8_t cp, lp;
cp = cc * 6 + 1;
lp = (ll + 1) * 12 - 1;
u8g2.setCursor(cp, lp);
}
// ������������������������������������������������������������������������
// ��L���l�Ƀe�L�X�g�̍s���w�肵�Ĕ��]������B
// �s�́A�O����S��5�s�Ƃ��Ďw�肷��B
// �ΏۂƂ���t�H���g�F u8g2.setFont(u8g2_font_6x12_mf);
// ��1�����ڂ̍�1�h�b�g�́A��B
// cc : ���@0����20
// ll : �s�@0����4
// ������������������������������������������������������������������������
void drawTxline(uint8_t ll)
{
uint8_t l1;
l1 = ll * 12 + 1;
u8g2.drawBox(0, l1, 127, 12);
}
// ������������������������������������������������������������������������
// �o�C�g�P�ʂŕ�����𒊏o����Mid��
// 128�����ȓ��𐧌����Ȃ����߁Aint8_t �ł͂Ȃ� int �^���g�p����B
//�@buf[]:���o��
// str[]:���o����镶����
// pos :���o�J�n�ʒu
// len :������
// return �́A���o������������Ԃ��B
// ������������������������������������������������������������������������
int mid(char *buf, char *str, int pos, int len)
{
int i;
int j = 0;
for (i = 0; str[i] != '\0'; i++) { // �Ώۂ̕�����̕����������܂ŏ���
if (i >= pos && i < pos + len) { // �w��ʒu�ƒ�������
buf[j] = str[i]; // buf[j]�Ɋi�[
j++;
}
}
buf[j] = '\0'; //buf�̖�����NULL�������i�[
return strlen(buf);
}
// ������������������������������������������������������������������������
// int cmmSTRcmm(char buf[], char str[], int cnt)
// 128�����ȓ��𐧌����Ȃ����߁Aint8_t �ł͂Ȃ� int �^���g�p����B
//
// ','�ŋ��܂ꂽ������𒊏o����B
//
// buf[] :���o�敶����
// str[] :�����Ώە�����
// cnt :���ڂ� ',' �Ȍ�̕�����ȍ~�𒊏o����̂��w��
// ���j�w����{�P�ȏ�� ',' �������ł��Ȃ��u�s�����v
// return
// 0�`n:���o����������
// -1 :�s����
//
// ������������������������������������������������������������������������
int cmmSTRcmm(char *buf, char *str, int cnt)
{
int c, i, h = 0, p1 = 0, p2 = 0;
int j = 0;
c = strlen(str);
if (cnt >= c) return -1; // �����T�������ʒu���Z�� (-1)
for (i = 0; c > i; i++)
{
if (str[i] == ',') {
h++;
if (h == cnt) p1 = i; // p1��',' cnt�ڂ̈ʒu�Z�b�g
if (h == cnt + 1) p2 = i; // p2��',' cnt+1�ڂ̈ʒu�Z�b�g
}
}
if (h < cnt + 1) return -1; // �w����{�P�ȏ�� ',' �������ł��Ȃ� (-1)
if (p1 + 1 == p2) { // ','�Ԃɕ�����[��
buf[0] = 0x00;
return 0;
}
for (i = 1; (p1 + i) < p2 ; i++)
{
buf[j] = str[p1 + i];
j++;
}
buf[j] = 0x00;
return p2 - p1 - 1; // �ϊ�������������Ԃ�
}
// ������������������������������������������������������������������������
// �f�o�r�f�[�^���玞���b�Ǝg�p���̂f�o�r���𒊏o����
// useGPS,nowTime �ɃZ�b�g����B
// �Ώۃf�[�^�F$GPGGA
// $GPGGA,001251.000,3445.9102,N,13527.9952,E,1,13,0.72,36.5,M,34.2,M,,*50<CR><LF>
// �����b.000, �k��, ���o,�u�f�o�r�̃N�I���e�B0=No,1=OK,2=DGPS�v, �g�p�q����, ]�ق�
// ������������������������������������������������������������������������
int8_t extractGPGGA(char *str) {
int8_t ci = 0;
char fn[2] = "0";
char tmp[16];
char tmps[16];
// �g�p�f�o�r���𒊏o
if (cmmSTRcmm(tmp, str, 6) > 0) {
switch (tmp[0]) {
case '2': // 0:��M�s�\�@1:�P�Ƒ��ʁ@2:DGPS
fn[0]++;
case '1':
fn[0]++;
strcpy(useGPS, fn);
ci = cmmSTRcmm(tmp, str, 7);
if (ci == 0) {
strcat(useGPS, ",00"); // �[�������@"00"�\�L
}
if (ci == 1) {
strcat(useGPS, ",0"); // 1�����@�擪��"0�h��t��
strncat(useGPS, tmp, 1);
}
if (ci >= 2) {
strcat(useGPS, ",");
strncat(useGPS, tmp, 2); // �擪�̂ݒ��o
}
break;
default:
gpsLoss++;
strcpy(useGPS, "0,00"); // �[�������@"00"�\�L
break;
}
}
return ci; // �g�p�f�o�r�̌�����Ԃ��B0-1-2
}
// ������������������������������������������������������������������������
// �f�o�r�f�[�^���玞���b�ƔN�����𒊏o����B
// useGPS,nowTime nowDate�ɃZ�b�g����B �g��Ȃ��\�� ==> GPZDA
// �Ώۃf�[�^�F$GNRMC
// $GNRMC,001252.000,A,3445.9100,N,13527.9957,E,0.11,275.89,040120,,,A*7C<CR><LF>
// �����b.000,�X�e�[�^�XA�L��:V����,�ܓx,�o�x,���x,����,�����N,�n���C,,���[�h*�`�F�b�NSUM
// ������������������������������������������������������������������������
int8_t extractGNRMC(char *str) {
int8_t jhh, jdd, jmm, cdd, cmm, leapY;
int16_t jyy;
char fn[2] = "0";
char tmp[16];
char tmps[16];
cdd = 0;
// �����b�𒊏o
if (cmmSTRcmm(tmp, str, 1) >= 10) { // HHMMDD.000 �\�����ȏ�Ȃ�
mid(tmps, tmp, 0, 2); // 2����
jhh = atoi(tmps); // UTC���Ԃ𐔎���
jhh = jhh + 9; // UTC +9H = JST
if (jhh >= 24) {
jhh = jhh - 24; // 24H�ȏ�Ȃ�24H������
cdd = 1;
}
sprintf(tmps, "%02d", jhh); // 2�����ɕϊ�
strcpy(nowTime, tmps); // JST�o��
strcat(nowTime, ":");
mid(tmps, tmp, 2, 2); // 2����
strcat(nowTime, tmps);
strcat(nowTime, ":");
mid(tmps, tmp, 4, 2); // 2���b
strcat(nowTime, tmps);
strcpy(tmpsec, tmps); // �b���L�����遡��
} else {
return 0;
}
if (cmmSTRcmm(tmp, str, 9) == 6) { // DDMMYY 6�����Ȃ�
mid(tmps, tmp, 4, 2); // 2���E�N
jyy = atoi(tmps); // UTC�N�𐔎���
jyy = jyy + 2000;
//////////// �[�N�̔���X�^�[�g
if (jyy % 4 == 0) {
if (jyy % 100 == 0) {
if (jyy % 400 == 0) {
leapY = 1;
} else {
leapY = 0;
}
} else {
leapY = 1;
}
} else {
leapY = 0;
}
//////////// �[�N�̔���G���h
mid(tmps, tmp, 0, 2); // 2���E��
jdd = atoi(tmps); // UTC���𐔎���
jdd = jdd + cdd; // 24H�̃I�[�o�[�t���[���Z
mid(tmps, tmp, 2, 2); // 2���E��
jmm = atoi(tmps); // UTC���𐔎���
//////////// ���̍ŏI���̔���
switch (jmm) {
case 4:
case 6:
case 9:
case 11:
if (jdd > 30) {
jdd = 1;
cmm = 1;
} else {
cmm = 0;
}
break;
case 2:
if (leapY == 0) {
if (jdd > 28) {
jdd = 1;
cmm = 1;
} else {
cmm = 0;
}
} else {
if (jdd > 29) {
jdd = 1;
cmm = 1;
} else {
cmm = 0;
}
}
break;
default: // 1 3 5 7 8 10 12
if (jdd > 31) {
jdd = 1;
cmm = 1;
} else {
cmm = 0;
}
break;
}
//////////// ���̍ŏI���̔���
jmm = jmm + cmm;
if (jmm > 12) {
jmm = 1;
jyy++; // �N��i�߂�
}
sprintf(tmps, "%04d", jyy); // 4����
strcpy(nowDate, tmps); // JST�o��
strcat(nowDate, "/");
sprintf(tmps, "%02d", jmm); // 2����
strcat(nowDate, tmps); // JST�o��
strcat(nowDate, "/");
sprintf(tmps, "%02d", jdd); // 2����
strcat(nowDate, tmps); // JST�o��
return 1; // ����i�����b�ƔN�����̗����j���o���́A1��Ԃ��B
} else {
return 0;
}
}
// ������������������������������������������������������������������������
// �f�o�r�f�[�^���玞���b�ƔN�����𒊏o����B
// useGPS,nowTime nowDate�ɃZ�b�g����B
// �Ώۃf�[�^�F$GPZDA
// $GPZDA,001251.000,04,01,2020,,*54<CR><LF>
// ���萢�E��(UTC�j�����b.000, DD,MM,YYYY,,*�`�F�b�NSUM
// ������������������������������������������������������������������������
int8_t extractGPZDA(char *str) {
int8_t jhh, jdd, jmm, cdd, leapY;
int16_t jyy;
char fn[2] = "0";
char tmp[16];
char tmps[16];
cdd = 0;
// �����b�𒊏o
if (cmmSTRcmm(tmp, str, 1) >= 10) { // HHMMDD.000 �\�����ȏ�Ȃ�
mid(tmps, tmp, 0, 2); // 2����
jhh = atoi(tmps); // UTC���Ԃ𐔎���
jhh = jhh + 9; // UTC +9H = JST
if (jhh >= 24) {
jhh = jhh - 24; // 24H�ȏ�Ȃ�24H������
cdd = 1;
}
sprintf(tmps, "%02d", jhh); // 2�����ɕϊ�
strcpy(nowTime, tmps); // JST�o��
strcat(nowTime, ":");
mid(tmps, tmp, 2, 2); // 2����
strcat(nowTime, tmps);
strcat(nowTime, ":");
mid(tmps, tmp, 4, 2); // 2���b
strcat(nowTime, tmps);
strcpy(tmpsec, tmps); // �b���L�����遡��
} else {
return 0;
}
if (cmmSTRcmm(tmp, str, 4) == 4) { // DDMMYY 6�����Ȃ�
jyy = atoi(tmp); // UTC�N�𐔎���
//////////// �[�N�̔���X�^�[�g
if (jyy % 4 == 0) {
if (jyy % 100 == 0) {
if (jyy % 400 == 0) {
leapY = 1;
} else {
leapY = 0;
}
} else {
leapY = 1;
}
} else {
leapY = 0;
}
//////////// �[�N�̔���G���h
if (cmmSTRcmm(tmp, str, 2) == 2) { // 2���E��
jdd = atoi(tmp); // UTC���𐔎���
jdd = jdd + cdd; // 24H�̃I�[�o�[�t���[���Z
} else {
return 0;
}
if (cmmSTRcmm(tmp, str, 3) == 2) { // 2���E��
jmm = atoi(tmp); // UTC���𐔎���
} else {
return 0;
}
//////////// ���̍ŏI���̔���
switch (jmm) {
case 4:
case 6:
case 9:
case 11:
if (jdd > 30) {
jdd = 1;
jmm++;
}
break;
case 2:
if (leapY == 0) { // �[�N�ł͂Ȃ�
if (jdd > 28) {
jdd = 1;
jmm++;
}
} else { // �[�N�ł���
if (jdd > 29) {
jdd = 1;
jmm++;
}
}
break;
default: // 1 3 5 7 8 10 12
if (jdd > 31) {
jdd = 1;
jmm++;
}
break;
}
//////////// �ŏI���̔���
if (jmm > 12) {
jmm = 1;
jyy++; // �N��i�߂�
}
sprintf(tmps, "%04d", jyy); // 4����
strcpy(nowDate, tmps); // JST�o��
strcat(nowDate, "/");
sprintf(tmps, "%02d", jmm); // 2����
strcat(nowDate, tmps); // JST�o��
strcat(nowDate, "/");
sprintf(tmps, "%02d", jdd); // 2����
strcat(nowDate, tmps); // JST�o��
return 1; // ����i�����b�ƔN�����̗����j���o���́A1��Ԃ��B
} else {
return 0;
}
}
// ������������������������������������������������������������������������
// �S�̃L�[�ɂ��p�����[�^�ݒ�E�ύX����
// ������������������������������������������������������������������������
// ����������F0�L�[�ɂ��ݒ蓙�̏����I������������
uint8_t jobSelect(uint8_t def) // F0�L�[�ɂ��A�ݒ蓙�̏����I��
{
int8_t i, j, p, xl;
int8_t stateRet = 0;
const char titlMsg[] = "Config MENU";
const char* selMsg[] = { "0.UART bps Set",
"1.SEND to HOST",
"2.First GATE time"
}; // ���̃A�C�e��(item)�̗L����-1�i�s��-1�j�����ɋL�q�B
const uint8_t item = 2;
uint8_t tmpprm;
j = def;
p = 0;
while (1)
{
u8g2.clearBuffer(); // OLED�N�����[
u8g2.setDrawColor(1); // ���]�p�̏����̂���
u8g2.drawBox(0, 2, 128, 12); // Box�`��
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(0, 0); // ���E�s
u8g2.print(titlMsg); // �^�C�g���̍s��\��
for (i = 0; i <= item; i++)
{
Text_setCursor(2, i + 1); // ���E�s
u8g2.print(selMsg[i]);
}
xl = (j + 2) * 12; // �}�[�J�[�ʒu�w��
u8g2.drawGlyph(5, xl , 0x25b6); // 0x21d2�� 0x25b6?
FuncEnable = B00001111;
func_print(0, "RETN");
func_print(1, " UP ");
func_print(2, "DOWN");
func_print(3, "ENTR");
u8g2.sendBuffer(); // OLED�ɑ��M�i�`�悷��j
switch (buttonSW()) {
case 10:
stateRet = 1;
break;
case 11:
// case 21:
j--;
if (j < 0) j = item;
break;
case 12:
// case 22:
j++;
if (j > item) j = 0;
break;
case 13:
// case 23:
switch (j) {
case 0: // UART BPS set
tmpprm = bpsPRM;
bpsPRM = confPRMset(j, tmpprm);
switch (bpsPRM) { // �ȑO�̏�ԂɊW�Ȃ����x�؊������s����B(2020/01/28)
case 1:
Serial1.println(bps192set); // <cr><lf>��t���đ��x��GPS�Ɏw��
delay(50);
Serial1.println(bps192set); // <cr><lf>��t���đ��x��GPS�Ɏw��(2���)
delay(50);
Serial1.end(); // �V���A������x�~�߂�
delay(50);
Serial1.begin(19200); // Serial1(PA9 PA10) �I�[�v��
break;
case 2:
Serial1.println(bps384set); // <cr><lf>��t���đ��x��GPS�Ɏw��
delay(50);
Serial1.println(bps384set); // <cr><lf>��t���đ��x��GPS�Ɏw��(2���)
delay(50);
Serial1.end(); // �V���A������x�~�߂�
delay(50);
Serial1.begin(38400); // Serial1(PA9 PA10) �I�[�v��
break;
case 0:
default:
Serial1.println(bps96set); // <cr><lf>��t���đ��x��GPS�Ɏw��
delay(50);
Serial1.println(bps96set); // <cr><lf>��t���đ��x��GPS�Ɏw��(2���)
delay(50);
Serial1.end(); // �V���A������x�~�߂�
delay(50);
Serial1.begin(9600); // Serial1(PA9 PA10) �I�[�v��
break;
}
if (bpsPRM != tmpprm) { // �����ւ����L����
write(0, bpsPRM); // ������ROM������
}
break;
case 1: // SEND to HOST
tmpprm = hostPRM;
hostPRM = confPRMset(j, tmpprm); // �V�����������Z�b�g
if (hostPRM != tmpprm) { // �����ւ����L����
write(1, hostPRM); // ������ROM������
}
break;
case 2: // GATE time
tmpprm = gatePRM;
gatePRM = confPRMset(j, tmpprm);
if (gatePRM != tmpprm) { // �����ւ����L����
write(2, gatePRM); // ������ROM������
}
break;
} // switch (j) end
break;
} // switch (buttonSW()) end
if (stateRet == 1) { // jobSelect(uint8_t)����
return j;
}
} // while (1) end
}
// ������������������������������������������������������������������������
// ����������M �{�^���̏�Ԃ�Ԃ�����
// ���ꂩ�̃{�^����������ĕ����ꂽ(F0=10,F1=11,F2=12,F3=13)��҂B
// ���ݒ�
// F0 < 80, 300 < F1 > 430, 580 < F2 < 790, 800 < F3 < 1100
// New (2020/04/16)
// F0 < 109, 110 < F1 > 548, 549 < F2 < 823, 823 < F3 < 1200,
// ������������������������������������������������������������������������
int8_t buttonSW() {
int8_t retVal = 0; // = 0 �̋L�q�͕K�{�B
int8_t repeat10 = 0;
int8_t count = 0;
uint16_t asw;
// while (1) {
asw = analogRead(SWa_In);
if (asw < 111) { // F0�{�^���Ȃ� return 10
while (asw < 111) { // F0�{�^��������܂ő҂�
delay(50);
asw = analogRead(SWa_In);
count++;
if (count >= 20) { // 1000mS �ȏ㉟���ꂽ��10�v���X
repeat10 = 10;
}
}
delay(50);
return 10 + repeat10;
}
if ((asw > 110) && (asw < 549)) { // F1�{�^���Ȃ� Plus
while ((asw > 110) && (asw < 549)) { // F1�{�^��������܂ő҂�
delay(50);
asw = analogRead(SWa_In);
count++;
if (count >= 20) { // 1000mS �ȏ㉟���ꂽ��10�v���X
repeat10 = 10;
}
}
delay(50);
return 11 + repeat10;
}
if ((asw > 548) && (asw < 824)) { // F2�{�^���Ȃ� Minus
while ((asw > 548) && (asw < 824)) { // F2�{�^��������܂ő҂�
delay(50);
asw = analogRead(SWa_In);
count++;
if (count >= 20) { // 1000mS �ȏ㉟���ꂽ��10�v���X
repeat10 = 10;
}
}
delay(50);
return 12 + repeat10;
}
if ((asw > 823) && (asw < 1200)) { // F3�{�^���Ȃ� return 13
while ((asw > 823) && (asw < 1200)) { // F3�{�^��������܂ő҂�
delay(50);
asw = analogRead(SWa_In);
count++;
if (count >= 20) { // 1000mS �ȏ㉟���ꂽ��10�v���X
repeat10 = 10;
}
}
delay(50);
return 13 + repeat10;
}
// } // while end
}
///////////////////////////////////////////////////////////////////////
// ������������������������������������������������������������������������
// �����I����ʂ�W�J���A�I�����ꂽ�l��Ԃ��B
// ������������������������������������������������������������������������
uint8_t confPRMset(uint8_t jobNo, uint8_t prm)
{
int8_t i, j, p, xl;
int8_t stateRet = 0;
const char* titlMsg[] = {
"0.UART BPS Set",
"1.SEND to HOST",
"2.First GATE time"
};
const char selMsg[3][3][22] = {
{ "9,600 bps(default)", // jobNo = 0
"19,200 bps(32.6%)",
"38,400 bps(16.3%)"
},
{ "GPS data(default)", // jobNo = 1
"LOG data",
"PIC"
},
{ "1 sec(default)", // jobNo = 2
"10 sec",
"100 sec"
}
};
int8_t item;
uint8_t tmpprm = 0;
switch (jobNo) { // �I�����鍀��(selMsg)�̐�������No���ɃZ�b�g����B012
case 0:
item = 2;
break;
case 1:
item = 2;
break;
case 2:
item = 2;
break;
};
j = prm;
p = 0;
while (1)
{
u8g2.clearBuffer(); // OLED�N�����[
u8g2.setDrawColor(1); // ���]�p�̏����̂���
u8g2.drawBox(0, 2, 128, 12); // Box�`��
u8g2.setDrawColor(2); // color 2 set
Text_setCursor(0, 0); // ���E�s
u8g2.print(titlMsg[jobNo]); // �^�C�g���̍s��\��
for (i = 0; i <= item; i++)
{
Text_setCursor(2, i + 1); // ���E�s
u8g2.print(selMsg[jobNo][i]);
}
xl = (j + 2) * 12; // �}�[�J�[�ʒu�w��
u8g2.drawGlyph(5, xl , 0x25b6); // 0x21d2�� 0x25b6?
func_print(0, "RETN");
func_print(1, " UP ");
func_print(2, "Down");
func_print(3, "ENTR");
u8g2.sendBuffer(); // OLED�ɑ��M�i�`�悷��j
switch (buttonSW()) {
case 10:
tmpprm = prm; // �����l�Ŗ߂�
stateRet = 1;
break;
case 11:
case 21:
j--;
if (j < 0) j = item;
break;
case 12:
case 22:
j++;
if (j > item) j = 0;
break;
case 13:
switch (j) {
case 0:
case 1:
case 2:
tmpprm = j;
stateRet = 1; // �I���������Z�b�g
break;
} // switch (j) end
break;
} // switch (buttonSW()) end
if (stateRet == 1) { // jobSelect(int8_t)����
return tmpprm;
}
} // while (1) end
}
///////////////////////////////////////////////////////////////////////
// ������������������������������������������������������������������������
// EEPROM 24C256 ���̊O��EEPROM��I2C�ǂݏ������B
// ������������������������������������������������������������������������
// 1�o�C�g����
uint8_t write(uint16_t address, uint8_t data) {
uint8_t rc;
Wire.beginTransmission(DEVICE_ADDRESS);
Wire.write((byte)(address >> 8)); // �A�h���X���
Wire.write((byte)(address & 0xFF)); // �A�h���X����
Wire.write(data);
rc = Wire.endTransmission();
delay(6);
return rc;
}
// 1�o�C�g�Ǎ�
uint8_t read(uint16_t address) {
Wire.beginTransmission(DEVICE_ADDRESS);
Wire.write((byte)(address >> 8)); // �A�h���X���
Wire.write((byte)(address & 0xFF)); // �A�h���X����
Wire.endTransmission();
Wire.requestFrom(DEVICE_ADDRESS, 1);
return Wire.read();
}
// ������������������������������������������������������������������������
 �@
�@