帺嶌岺掱偺儊儌偲偟偰
2010.Dec
2011/03/06:峏怴拞
![]() SD330
僐儞僩儘乕儔惢嶌
SD330
僐儞僩儘乕儔惢嶌
帺嶌岺掱偺儊儌偲偟偰
2010.Dec
2011/03/06:峏怴拞
埲壓偼丄僽儗僢僪儃乕僪偵懕偔帋嶌俀崋偱丄偟偽傜偔偙偺傑傑偱僨僶僢僌傪懕偗傞梊掕偵偟偰偄傑偡丅
仏偙偺僐儞僩儘乕儔傪夵憿偟偰丄Hi-Q-4/160 梡偺僐儞僩儘乕儔傪岞奐偟偰偄傑偡丅(2013/01/04)
丂
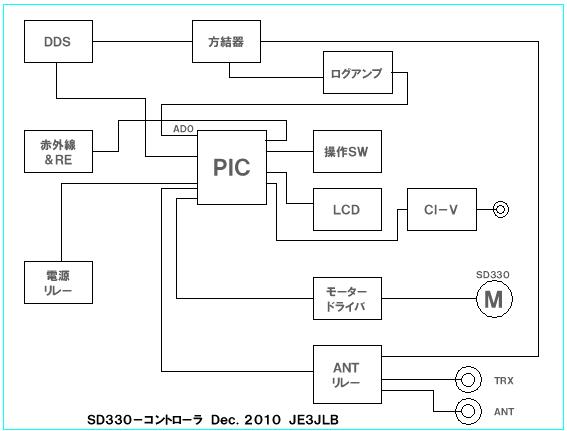
仭僽儘僢僋僟僀傾僌儔儉
埲壓偺傛偆側戝傑偐側峔憐傪幚尰偟傛偆偲丄庢傝妡偐偐傝傑偟偨丅
俀侽侾侾擭侾寧尰嵼丄愒奜慄偺庴岝張棟偼幚尰偟偰偍傝傑偣傫偑丄帋嶌俀偵偼晹昳傪慻崬傒嵪傒偱丄杮宖嵹偺嵟屻偺偁偨傝偱徯夘偱偒傞梊 掕偱偡丅(2011/02/11丗捛壛宖嵹)峔憐偺奣棯
侾丏俢俢俽傪巊偭偰俽倂傾僫儔僀僓乕偲摨條偵丄僗僋儕儏乕僪儔僀僶乕傾儞僥僫傪挷惍偡傞丅
俀丏尰俼俬俧偺廃攇悢怣崋傪乮俠俬亅倁偱乯庢傝崬傒丄僗僞乕僩俽倂傪墴偣偽帺摦揑偵摨挷憖嶌傪偡傞丅
俁丏庤摦偱傕丄敪怳廃攇悢傪曄峏偱偒丄帺摦儌乕僪偲摨條偵僗僞乕僩俽倂偱摨挷憖嶌傪偡傞丅
係丏愒奜慄傪巊偭偨儕儌僐儞偱丄揹尮俷俶埲奜偺庡梫側憖嶌傪幚巤偱偒傞丅
丂
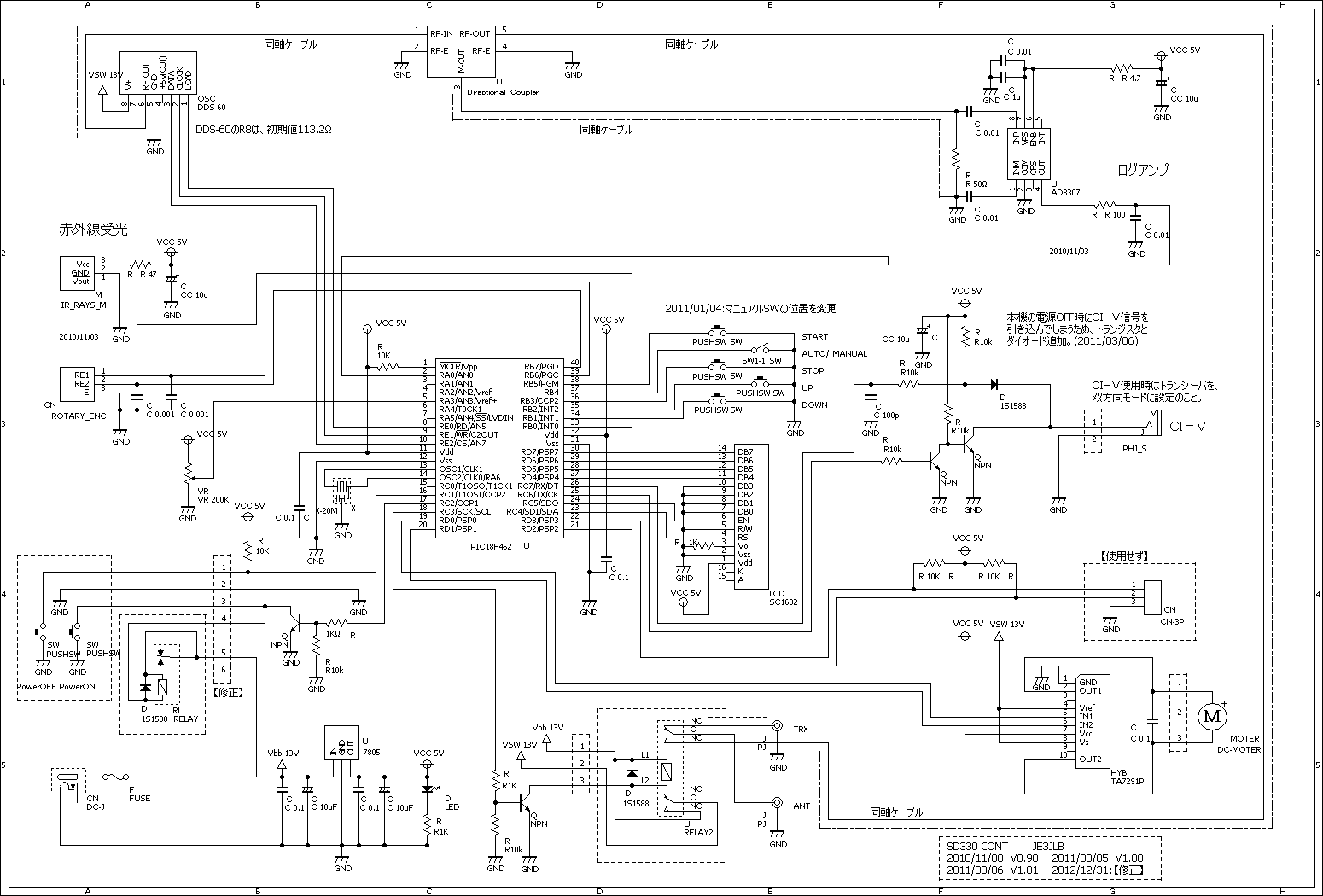
仭夞楬恾丂乮2011/02/11丗捛壛 2011/03/12丗 曄峏乯
僾儕儞僩婎斅偱傕偮偔傞帪偵偼揹尮偺ON/OFF夞楬傪嵞専摙偟偨偄偲巚偄傑偡偑丄摉弶梊掕偟偰偄偨婡擻偼偙偺夞楬偱摦嶌偡傞傛偆 偵側傝傑偟偨丅僒儞僾儖夞楬摍偺婑偣廤傔偱偡偑丄壗偐偺嶲峫偵側傟偽岾偄偱偡丅
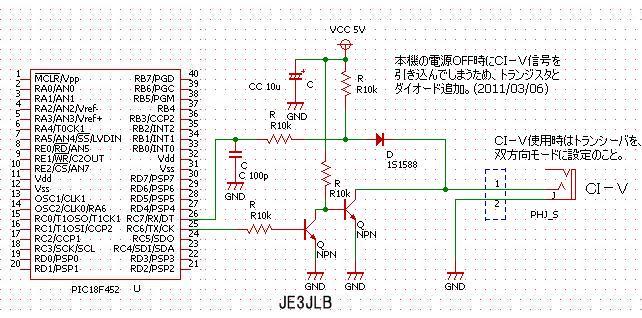
乮悈嫑摪偝傫偺夞楬恾僄僨傿僞BSch3V傪巊梡偝偣偰偄偨偩偒傑偟偨丅乯CI-V娭楢偺夞楬傪堦晹曄峏偟傑偟偨丅乮2011/03/06乯
ANT儕儗乕晹暘傪廋惓偟傑偟偨丅(2011/03/12)
丂
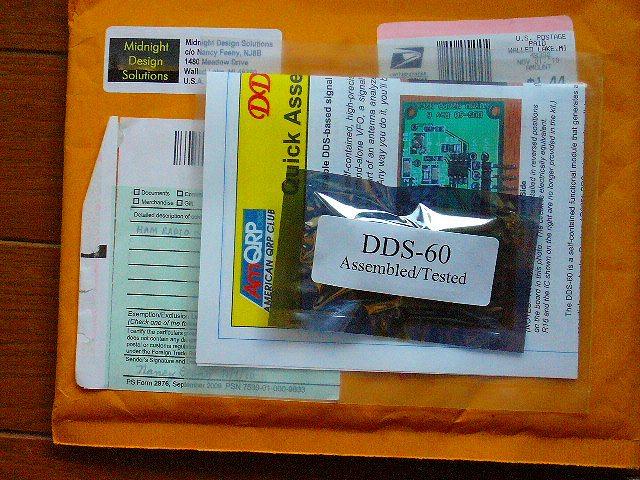
| 侾丏DDS偺慖掕乮俢俢俽亅俇侽乯 |
丂俫俥懷乮俁侽俵俫倸乯偱偒傟偽俆侽俵俫倸傑偱僇僶乕偡傞偨傔偺俢俢俽偼丄摉弶偐傜庤帩偪偺俙俢俋俉俁係偱偼柍偔俙俢俋俉俆侾傪巊偆梊 掕偵偟偰偄傑偟偨丅丂偦偙偱倂倕倐忋偱専嶕偟偰偄傞偲俶俀俙俹俛偝傫偺乽俢俢俽亅俇侽乿偑栚偵棷傑傝丄擔杮崙撪偱幚嵺偵巊梡偟偰偄傞曽傕 偄傜偭偟傖傞傛偆偱偡偺偱丄拲暥偟偰傒傞偙偲偵偟傑偟偨丅
俹倎倷俹倎倢傕弶傔偰巊梡偟傑偟偨偑丄拲暥偐傜俀廡娫掱搙偱撏偒傑偟偨丅嵟弶丄俹倎倷俹倎倢偺搊榐帪偵擔杮岅偺廧強丒巵柤傪巊偭偨偨傔 偵丄塸岅昞婰偺廧強傪憲傞傛偆儊乕儖偑棃偨傝偟偰庤娫庢傝傑偟偨丅乮偦偺屻丄塸岅昞婰偵曄峏乯
丂峏偵丄偦偺屻傕偆堦屄捛壛偱拲暥偟丄崌寁俀屄偺乽DDS-60乿偑尰嵼庤尦偵偁傝傑偡丅丂巹偼丄俲俬俿偱偼側偔姰惉昳乮俉俆亹乯傪拲暥 偟傑偟偨偑丄墌崅偺儊儕僢僩傪弶傔偰懱尡偟丄摼偟偨婥暘偵側傝傑偟偨丅
丂
| 俀丏帋嶌侾乮僽儗僢僪儃乕僪乯丂偲丂奐敪 僣乕儖椶 |
夞楬偼丄倂倕倐忋偱岞奐偝傟偰偄傞傕偺偺婑偣廤傔偺傛偆側傕偺偱丄嵟弶偼僽儗僢僪儃乕僪忋偱幚尡偟偰廋惓傪偟偰偄偒丄傎傏尰嵼偺傕偺偱 棊偪拝偔偲巚傢傟傑偡丅
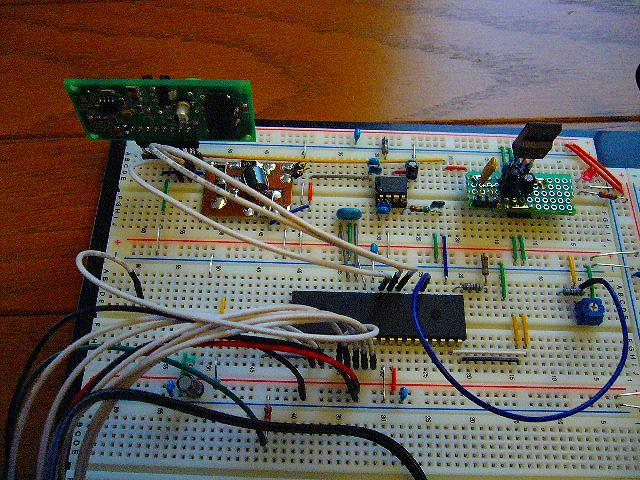
仭僽儗僢僪儃乕僪
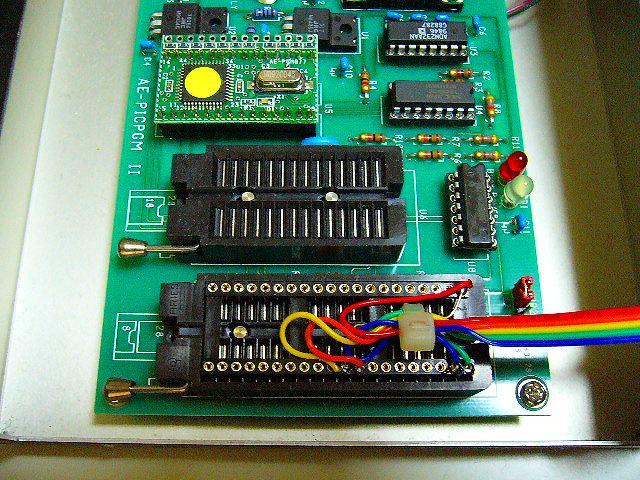
偙偺偲偒偼丄俹俬俠丂侾俇俥俉俈俈俙傪巊偭偰僗僞乕僩偟傑偟偨丅丂嵍忋偺俢俢俽亅俇侽偺嬤偔偵偁傞摵敁偑傓偒弌偟偺僾儕儞僩婎斅偼丄 俠倎倢倠倝倲偺乽俆侽兌丂僀儞僺乕僟儞僗僽儕僢僕乿偱偡丅偦偺婎斅忋偵偁傞僩儔儞僗偺岦偒傪曄峏偟偰丄乽儕僞乕儞儘僗僽儕僢僕乿偲偟偰巊 梡偟偰偄傑偟偨丅
偦偺乽儕僞乕儞儘僗僽儕僢僕乿偺怣崋傪俙俢俉俁侽俈丗儘僌傾儞僾偱庴偗偰丄俹俬俠偺俙俢抂巕偵庢傝崬傫偱偄傑偡丅
屻偵倄倎倛倧倧偺僆乕僋僔儑儞偱乽曽岦惈寢崌婍乿乮埲壓丄曽寢婍乯傪尒偮偗丄傛傝惈擻偑椙偄偺偱偼偲巚偄擖庤屻尰嵼傕曽寢婍傪巊偭偰偄傑 偡丅
幚尡抜奒偱偟偨偺偱偼偭偒傝偟偨偙偲偑尵偊傑偣傫偑丄偙偺乽儕僞乕儞儘僗僽儕僢僕乿偱傕俽倂俼偺嵟掅揰偼曽寢婍偲懟怓側偔僨傿僢僾偟偰偄 偨傛偆偵巚偄傑偡丅偨偩偟丄僽儗僢僪儃乕僪忋偱棁偺忬懺偱偟偨偺偱丄埨掕搙偐傜偡傞偲幚巊梡偼擄偟偔丄僔乕儖僪俛倧倶偵擖傟傟偽傛偄偺偱 偡偑丄偦偺岺嶌偑戝曄偱曽寢婍偲偟傑偟偨丅
仭俹俬俠儔僀僞乕乮2011/01/01丗捛婰乯
俹俬俠儔僀僞乕偼廐寧揹巕偺乽俹俬俠僾儘僌儔儅倁係乿偱丄崱夞僼傽乕儉僂僃傾乕傪倁俇丏俈俀偵傾僢僾偟偰傗偭偲杮奿揑偵巊偆傛偆偵側傝 傑偟偨丅
摉弶偼丄彂偒崬傒偺搒搙僛儘僾儗僢僔儍乕俬俠僜働僢僩偐傜奜偟偰丄廐寧俹俬俠僾儘僌儔儅偵嵹偣偰偄傑偟偨丅偟偐偟丄堦偮傂偲偮偺張棟傪庤 扵傝偱幚尡偟側偑傜恑傔偰偄傞偨傔彂偒崬傒夞悢傕懡偔側傝丄俬俠俽俹偵愗傝懼偊傞偨傔俹俬C倠倝倲俀偱傕峸擖偟傛偆偐偲峫偊傑偟偨偑丄 俰俼俁俿俧俽偝傫偺儂乕儉儁乕僕偱廐寧俹俬俠僾儘僌儔儅倁係傪俬俠俽俹偱巊偆曽朄偑徯夘偝傟偰偄偰丄偦偺捠傝偱偒偨偨傔丄埲壓偺傛偆側傾 僟僾僞傪嶌偭偰俬俠俽俹愙懕偟偰偄傑偡丅偨偩偟丄俽倳値倛倎倷倎倲倧偺婎斅乮MB-P02丗斕攧姰椆昳乯傪巊偭偨娭學偱丄亄俆倁儔僀儞乮俁俀俹倝値乯傪捛壛偟偰偦偺傑傑愙懕偱 偒傞傛偆偵偟偰偄傑偡丅
丂
働乕僽儖偼慡挿俆俆們倣偖傜偄偺挿偝偵側傝傑偡丅乮偁傑傝挿偄偲岆摦嶌偡傞偲偺偙偲偱偟偨偺偱乯
丂
偦偺傑傑嵹偣傞偩偗偱丄廐寧乽俹俬俠僾儘僌儔儅倁係乿偱堄幆偡傞偙偲側偔僾儘僌儔儈儞僌偱偒傑偡丅
丂
壓偺夋憸偵偁傞僾儘僌儔儉俽倂乮壓晹拞墰乯偺嵍偑丄俬俠俽俹梡偺僜働僢僩乮俠俶侾乯偵側傝傑偡丅丂僾儘僌儔儉俽倂偱愗傝懼偊傞偲丄廃曈 夞楬偑愗傝棧偝傟偰俹俬俠扨懱偵懳偟偰俬俠俽俹偺彂偒崬傒偑偱偒傑偡丅丂偙偺俵俛亅俹侽俀婎斅偼丄悢擭慜偵侾僙僢僩峸擖偟偰偄偰崱夞傑偱 巊傢側偄傑傑曐娗偟偰偄傑偟偨丅
尰嵼偼斕攧姰椆昳偵側傝傑偟偨偑丄巊偭偰傒傞偲戝曄曋棙偵巊偆偙偲偑偱偒傑偟偨丅
丂
仭俠僐儞僷僀儔乕丂俵倝倠倰倧俠丂俹俼俷丂倁倕倰丏係丏俇乮俀侽侾侾乛侽侾乛侽侾丗捛婰乯
俹俬俠偺俠僐儞僷僀儔乕偼弶傔偰巊偆偙偲偵側傝傑偡丅崱傑偱傾僙儞僽儔偱張棟偟偰偄傑偟偨偑丄偄偔傜側傫偱傕崱夞偺張棟偼丄憡摉偺庤弴 偑昁梫偲側傝丄怴偟偄偙偲偵挧愴偡傞偮傕傝偱丄俀俲儚乕僪埲撪側傜偦偺傑傑巊偊傞俵倝倠倰倧俠傪帋梡偟偰偄傞偆偪偵丄壗偲偐側傝偦偆偩偲 偄偆姶怗偑偁傝儔僀僙儞僗傪怽偟崬傒偡傞偙偲偵偟傑偟偨丅
岞奐忣曬偺彮側偄俵倝倠倰倧俠偱偡偑丄俫倕倢倫偑廩幚偟偰偄傞偙偲偲丄僶乕僕儑儞傾僢僾傕昿斏偵峴傢傟偰偄偰丄偦傟偵偐偐傞捛壛偺椏嬥偑 敪惗偟側偄乮俀侽侾侽擭侾俀寧尰嵼乯偙偲偱嵦梡偟傑偟偨丅偙傟傕丄侾侾寧巒傔偐傜倁倕倰係丏侾俆傪巊偭偰偄偰搑拞偱倁係丏俇侽偵僶乕僕儑儞傾僢僾偟傑偟偨偑丄埲慜偺僶乕僕儑儞傪傾儞僀儞僗僩乕 儖偟偰怴斉傪僀儞僗僩乕儖偟丄搊榐梡偺俠俢亅俼傪擖傟傞偙偲偱惂尷柍偔巊偊偰偄傑偡丅
儔僀僙儞僗偺搊榐偼丄儅僀僋儘僥僋僯僇幮傪捠偠偰怽惪偟侾侽擔掱搙偡傟偽俠俢亅俼傪憲偭偰偔傟傑偡丅埲壓偺悈怓偺儅僗僋晹偼丄惄柤偑擖傝傑偡丅
丂
| 俁丏帋嶌俀丂斈梡働乕僗偵幚憰 乮2011/01/01丗捛婰乯 |
丂暥摢偵傕偁傝傑偡傛偆偵丄帋嶌俀偲偟偰儕乕僪偺乽俹亅侾俀乿働乕僗偵廂傔偰傒傑偟偨丅僒僀僘偼丄倂丗俀俆侽丒俫丗俇侽丒俢丗侾俆侽偱 偡偑丄幚尰偱偒傞偐敿怣敿媈偱杮奿揑側働乕僗傪慖戰偡傞偺傪鏢鏞偟偰偍傝丄偆傑偔摦偗偽偦偺偲偒峫偊傞偙偲偵偟傑偟偨丅丂偟偐偟丄偙偺 働乕僗傕壛岺偡傞偙偲偵敿擔埲忋旓傗偟傑偟偨偟丄帺暘偱巊偆暔偩偲奿岲傪婥偵偟偰傕偟傚偆偑偁傝傑偣傫偺偱摉柺偼偙偺傑傑巊偆偙偲偵側傞 偲巚偄傑偡丅
屻傠懁偐傜尒偨夋憸偱偡丅
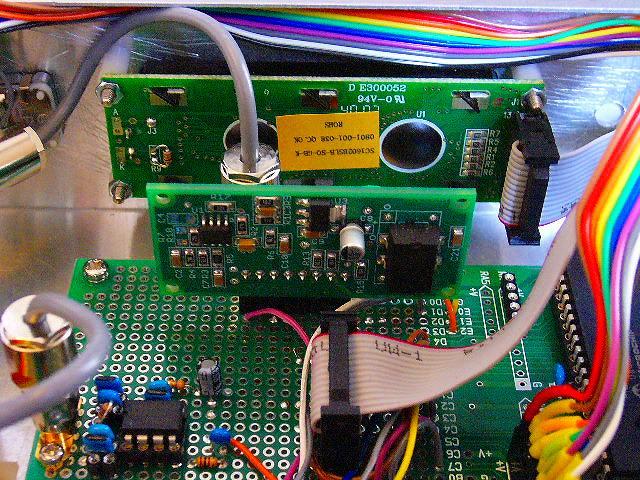
嵍偐傜丄俼俬俧丒俙俶俿丒俽俢俁俁侽儌乕僞乕丒俠俬亅倁丒庡揹尮俽倂丒侾俁丏俉倁乮侾俆倁乯僜働僢僩丄偲側傝傑偡丅丂傑偨丄俙俠傾僟僾 僞乕梡偺寠偼峀偘偡偓偰晄妴岲偵側偭偰偄傑偡丅
丂
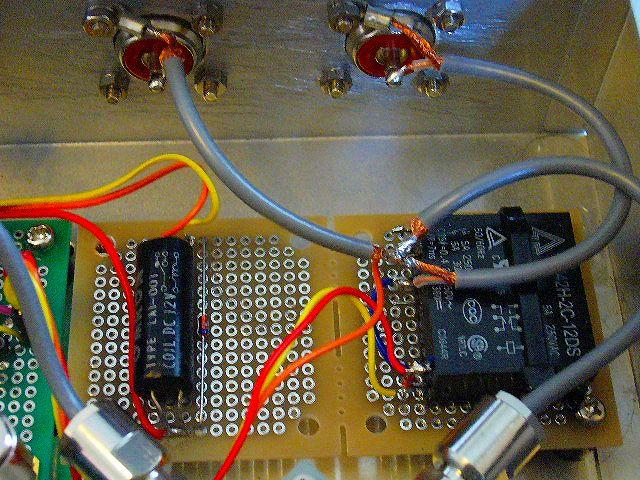
偙偪傜偼丄嵍懁偺儕乕僪儕儗乕偑揹尮曐帩梡偱丄塃懁偑傾儞僥僫偲侾俁丏俉倁偺嫙媼儕儗乕偱偡丅儕乕僪儕儗乕偼栺俁侽擭埲忋慜偺暔傪僷乕 僣俛倧倶偺拞偐傜扵偟弌偟偰巊偭偰偄傑偡丅偙傫側婡夛偑柍偄偲偙偺愭傕巊傢偢偠傑偄偺傑傑廔傢偭偰偟傑偆偙偲偵側偭偨偐傕抦傟傑偣傫丅 乮摦偄偰傛偐偭偨乯
丂
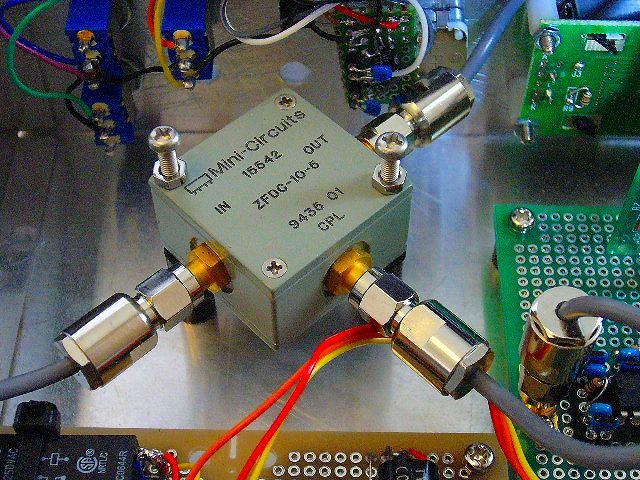
偙偪傜偑乽曽岦惈寢崌婍乿曽寢婍(ZFDC-10-5)偱丄拞屆偱偡偑儈僯僒乕僉僢僩幮偺僇僞儘僌壙奿掱搙偱擖庤偟偰偄傑偡丅傑偨丄 俽俵俙僐僱僋僞乕偼廐寧揹巕乮懠偺晹昳傕傎偲傫偳偑廐寧乯偐傜偺捠斕偱擖庤偟傑偟偨偑丄堦晹偼戝嶃丒擔杮嫶偺奺僷乕僣僔儑僢僾偐傜偺傕偺 傕桳傝傑偡丅
丂
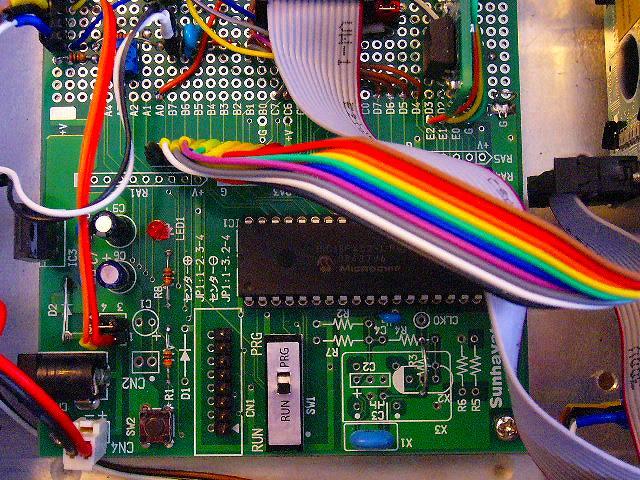
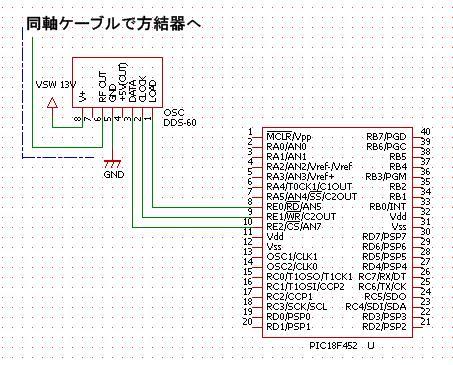
俢俢俽亅俇侽傪拞怱偲偟偨夋憸丅
嵍壓偼丄俙俢俉俁侽俈丗儘僌傾儞僾偱丄擖椡偺僐儞僨儞僒乕偼夞楬忋偼侾偮偱偡偑丄俀庬椶傪憓偣傞傛偆偵俬俠僜働僢僩傪巊偭偰偄傑偡丅傑 偨丄廔抂偲偟偰偺俆侽兌傕僜働僢僩偱奜偡偙偲偑偱偒傞傛偆偵偟偰偄傑偡丅
丂
| 係丏俢俢俽亅俇侽乮俙俢俋俉俆侾乯偺僐乕 僨傿儞僌 乮2011/01/08丗捛婰乯 |
巊偭偰偄傞恖偑偄傞偲偄偆偙偲偱丄僷乕僣偩偗愭偵拲暥偟傑偟偨丅媣偟傇傝偵堦偐傜僨乕僞僔乕僩傪挱傔側偑傜怓乆幚尡傪偟偰傒傑偟偨偑丄 屻娬偝傫偺岞奐忣曬傪嶲峫偵偟偰傕丄俢俢俽亅俇侽偑儕僙僢僩夞楬傪帩偨側偄偨傔丄婲摦偺僔乕働儞僗傗丄
俵倝倠倰倧俠偺僶 僌丠偵擸傑偝傟丄惓偟偄婰弎偑壗偐偲偄偆偙偲傪壗擔傕峫偊懕偗傑偟偨丅乮惓偟偄昞婰曽朄偑偁傞偲偼巚偄傑偡偑丄撉 傒偒傟傑偣傫偱偟偨乯
摦偄偰偟傑偊偽僇儞僞儞側偙偲偱偟偨偑丄懠偺曽偺嶲峫偵側傟偽岾偄偱偡丅乮2011/01 /15:僶僌丠晹暘偑惓忢摦嶌偲側傝傑偟偨丅巹偺姩堘偄乯仭俢俢俽亅俇侽偺廃曈夞楬
俢俢俽亅俇侽偼丄俹俬俠偺俼俤億乕僩偵偮側偄偱偄傑偡偑丄俢俢俽亅俇侽偺奜晹偵儕僙僢僩夞楬偼弌偰偄側偔丄僨乕僞偺嫙媼慄乮俁杮乯偺傒 偲側偭偰偄傑偡丅
俼俤億乕僩傪嵦梡偟偨偺偼丄摿偵堄枴偼柍偔丄挌搙俁價僢僩暘偑撈棫偟偰偄偰搒崌偑傛偝偦偆偩偐傜偱偟偨丅
仭俢俢俽亅俇侽偺婲摦
婲摦偼丄嬻偺僷儔儊乕僞傪憲傞丅
僨乕僞僔乕僩傪挱傔偰偄傞偲丄弶婜抣偺僷儔儗儖儌乕僪偐傜僔儕傾儖儌乕僪傊曄峏偡傞偨傔偵丄揹尮俷俶屻偵俢俢俽亅俴俷俙俢怣崋傪憲傝崬傓 昁梫偑偁傝丄偦偺娭悢乮 DDS_on(void) 乯偲偟偰丄埲壓偺傛偆偵婰弎偟偰傒傑偟偨丅
//// Port E 掕媊 DDS Controle sbit DDS_CLOCK at RE1_bit; // DDS-60 CLOCK sbit DDS_LOAD at RE0_bit; // DDS-60 LOAD sbit DDS_DATA at RE2_bit; // DDS-60 DATA sbit DDS_CLOCK_Direction at TRISE1_bit; sbit DDS_LOAD_Direction at TRISE0_bit; sbit DDS_DATA_Direction at TRISE2_bit; // 徣棯 main() { TRISE = 0x00; // set direction to be output // 徣棯 } // DDS偺愝掕惂屼 //// 揹尮ON帪偵幚峴偡傞 /////////////////////////// ///// 弶婜偺僷儔儗儖儌乕僪偐傜僔儕傾儖儌乕僪偵愝掕 void DDS_on(void) { int di; delay_ms(1); DDS_CLOCK = 1; //W0儘乕僪 delay_us(1); DDS_CLOCK = 0; delay_us(1); DDS_LOAD = 1; //僔儕傾儖儌乕僪愝掕 delay_us(1); DDS_LOAD = 0; delay_ms(1); /// 擔杮岅僨乕僞僔乕僩乮P11乯偱悇彠偟偰偄傞偨傔丄 /// 僔儕傾儖儌乕僪愝掕屻丄捈偪偵嵟弶偺僟儈乕僨乕僞傪憲傝崬傓丅 /// 廃攇悢偼0Hz丄x6 儌乕僪偺傒愝掕丅2010/11/21:JLB for(di=0; di<40; di++) { if(di == 32) DDS_DATA = 1; else DDS_DATA = 0; delay_us(1); DDS_CLOCK = 1; delay_us(1); DDS_CLOCK = 0; delay_us(1); } DDS_LOAD = 1; //廃攇悢抣儘乕僪巜帵 delay_us(1); DDS_LOAD = 0; }
仭俢俢俽廃攇悢偺愝掕
屻娬偝傫偺僒儞僾儖傪偦偺傑傑棙梡偝偣偰偄偨偩偄偰偄傑偡丅
PICFun AD9851 偱専嶕偡傟偽嵟弶偵弌偰偒傑偡丅
偙傟偵傕侾廡娫掱搙擸傒丄僨僶僢僌偺偨傔偺僐乕僪傪杽傔崬傒幚尡傪孞傝曉偟偰丄戙懼張棟傪婰弎偟偰摦偐偟偰偄傑偟偨偑丄MikroC偵 偍偗傞宆愰尵偺尒捈偟偲億乕僩弌椡偺婰弎曄峏偩偗偱丄摦嶌偡傞偙偲偑妋擣偱偒傑偟偨丅乮2011/01/15:MikroC PRO for PIC v.4.60.0.0乯
/// 廃攇悢愝掕抣 static union { // 屻娬巵偺僒儞僾儖偵桳偭偨嫟梡懱偺 unsigned long Phase; // 婰弎丅宆偼MikroC偵曄峏丅 unsigned char iPhase[4]; // } DDSdata; // 2011.01.15 JLB //丂
////// 廃攇悢乮侾侽恑乯傪DDS偵憲弌丂娭悢丂丂/////// void DECtoDds(long dds_f ) { int i, j, mask; float Para; Para = 23.86093 * dds_f; //2偺32忔亐180MHz=23.86092942 DDSdata.Phase = (unsigned long)Para; //IDirect = 1; // IRP bit must be set manually for // indirect access to 'sub' variable // 僐儞僷僀儔乕偐傜sub[4] 傪巊偆偲偒偼 // 儅僯儏傾儖偱IRP傪僙僢僩偡傞傛偆巜帵 // 偑桳偭偨偨傔丅2010.12.25 JLB // 乮偙傟偑柍偄偲DDS偑偆傑偔敪怳偟側偄乯 // 偟偐偟丄18F452 偱偼晄梫偱偟偨丅 ////丂廃攇悢抣32價僢僩弌椡偡傞 for(i=0; i<4; i++) { mask = 0x01; //價僢僩儅僗僋偺弶婜愝掕 for(j=0; j<8; j++) { if(DDSdata.iPhase[i] & mask) DDS_DATA = 1; else DDS_DATA = 0; delay_us(1); DDS_CLOCK = 1; //價僢僩憲怣僋儘僢僋 delay_us(1); DDS_CLOCK = 0; mask = mask << 1; //價僢僩儅僗僋偺價僢僩僔僼僩 } } ///丂愝掕惂屼8價僢僩弌椡 mask = 0x01; //價僢僩儅僗僋偺弶婜愝掕 for(j=0; j<8; j++) { if(0x01 & mask) //俇攞儌乕僪偺傒侾 DDS_DATA = 1; else DDS_DATA = 0; delay_us(1); DDS_CLOCK = 1; //價僢僩憲怣僋儘僢僋 delay_us(1); DDS_CLOCK = 0; mask = mask << 1; //價僢僩儅僗僋偺侾價僢僩僔僼僩 } DDS_LOAD = 1; //廃攇悢抣儘乕僪巜帵 delay_us(1); DDS_LOAD = 0; //IDirect = 0; }丂
| 俆丏CI- V偵傛傞廃攇悢僨乕僞偺庢崬傒 (2011/01/22丗捛婰) |
俠俬亅倁夞楬偼丄傾僀僐儉偺僩儔儞僔乕僶傪巊偭偰偄傞娭學偱丄楢摦偡傞偙偲傪嵟弶偐傜憐掕偟偰偄傑偟偨丅尰嵼偼丄俬俠亅俈俇侽侽俵傪 巊偭偰偍傝倀俽俛抂巕偐傜俠俬亅倁僐儞僩儘乕儖傪偟偰偄傑偡偑丄俹俠懁偲偼暿宯摑偱廬棃偺3.5mm儌僲儔儖僕儍僢僋偱庢弌偣傞抂巕傕嬻 偄偰偄傞偨傔丄捈偵偦偺抂巕偐傜偺怣崋傪庢傝崬傓偙偲傪峫偊偰偄傑偟偨丅偟偐偟丄崱傑偱俹俬俠偵捈愙愙懕偟偨偲偒偵俹俬俠懁偺怣崋偑晧榑棟偐惓榑棟偐傪堄幆偟偨偙偲偑柍偔丄柪偄傑偟偨丅乮僀儞僶乕僞傪擖傟傞偐擖 傟側偄偐乯
偙傟傕丄僽儗僢僪儃乕僪偺幚尡偺帪偵妋擣偱偒偨夞楬偱偡偑丄埲壓偺傛偆偵愙懕偟偰栤戣側偔摦嶌偟偰偄傑偡丅
捛婰丗杮婡傪揹尮OFF偵偟偰偄傞偲丄CI-V怣崋偑堷偒崬傑傟傞尰徾偑敪惗偟丄慜擔偼 僟僀僆乕僪傪憓擖偟偨廋惓傪偟傑偟偨偑丄偦偺屻傕帪乆敪惗偟偰偍傝戝妡偐傝側廋惓傪偟傑偟偨丅
愭偢庴怣娭學偼丄億乕僩側傜傃偵僾儖傾僢僾掞峈偐傜偺堷偒棊偲偟傪僟僀僆乕僪偱慾巭偟偰偄傑偡丅
峏偵憲怣娭學偼丄僩儔儞僕僗僞乮2SC1815乯偱僀儞僶乕僞傪俀抜擖傟偰PIC懁偺億乕僩偺塭嬁傪CI-V傊梌偊側偄傛偆偵曄峏偟 傑偟偨丅
偙傟偵傛傝丄曄 峏慜偺杮婡偺揹尮OFF帪偺忬懺偼丄捠忢3.3V偁傞CI-V怣崋偑丄億乕僩傊偺堷偒棊偲偟偵傛傝1.7V偐傜1.4V偖傜偄傑偱壓 偑偭偰偍傝丄PC摍傊峴偔怣崋傪堷偒棊偲偟偰偄傑偟偨偑丄偙偺夞楬曄峏偱丄揹尮OFF帪偱傕CI-V怣崋偼3.1V傑偱夞暅偟偰偄傑 偡丅
傑偨丄揹尮傪擖傟偨偲偒偼丄僾儖傾僢僾偺娭學偱5V晅嬤偺揹埑傪帵偟偰偄傑偡丅
乮2011/03/06乯
丂
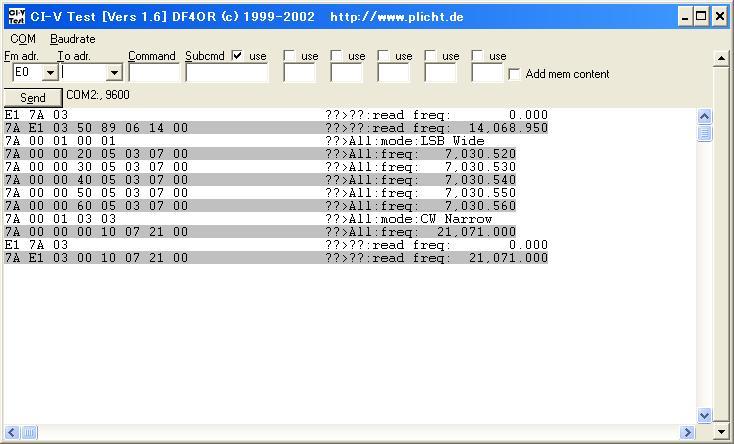
傑偨丄俠俬亅倁偺惂屼偱偡偑丄摉弶僐儞僩儘乕儔偐傜廃攇悢僨乕僞傪撉傒庢傞偨傔偺婲摦僐儅儞僪乮侽俁乯傪偳傫側僼儗乕儉偱憲傝崬傔偽傛 偄偺偐偑暘偐傜偢丄僼儕乕偱岞奐偝傟偰偄傞DF4OR偝傫偺俠俬亅倁丂俿俤俽俿傪巊偭偰傒傑偟偨丅
嵟弶偺峴乮E1 7A 03乯偲側偭偰偄傞売強偼丄FE FE 7A E1 03 FD 偺俇僶僀僩傪憲傝崬傫偱偄傑偡丅
偦偺墳摎偑丄7A E1 03 50 89 06 14 00 偱丄愭摢偺FE FE 偲嵟屻偺FD 偑徣棯偝傟偰昞帵偝傟偰偄傞偲偙傠偱偡丅
峏偵丄7A 00 00 偲懕偄偰偄傞偲偙傠偼丄俼俬俧偺倁俥俷僲僽傪摦偐偟偨偲偒偵弌椡偝傟傞怣崋偱丄杮棃偼偙偺怣崋傪庢崬傔偽帠懌傝傞偺偱偡偑丄俼俬俧偺侾侽僉乕晹偱僶儞僪 僠僃儞僕偟偨帪偼偙偺怣崋偑弌傑偣傫丅偦偺偨傔丄摿掕偺応崌偵廃攇悢偑庢崬傔傞偙偲偑昁梫偵側偭偰偒傑偡丅
(2018/01/28:幚怣崋偼庴怣傾僪儗僗憲傾僪儗僗偺弴偱偡偑丄僜僼僩偱憲庴偺弴偵彂偒姺偊偰偄傞偨傔廋惓偟傑偡丅乯
丂
俠俬亖倁偺怣崋庴怣偼丄幚尡抜奒偱偼丄捠忢偺婰弎傪偟偰偄傑偟偨偑丄摦嶌妋擣屻偼妱崬傒傪巊偭偰庢崬傫偱偄傑偡丅
civ_count 偱侾僶僀僩偛偲撉傒庢傝側偑傜丄僼儗乕儉偲徠崌偟偰丄俛俠俢僨乕僞偲偟偰奿擺偟偰偄傑偡丅
main() 偱偼丄偦偺僇僂儞僞乕偑侾侾偵側偭偨偺傪妋擣偟偰丄幚廃攇悢偲偟偰庢崬傫偱偄傑偡丅
// 徣棯 / UART LCD ... char civ_address = 0x7A; // iCOM IC-7600 CI-V Address char pc_address = 0xE1; // PC address default 0xE0 int civ_count = 0; // CI-V妱傝崬傒偱11寘撉崬傒僇僂儞僞 char civ_get_str[6] = { 0xFE,0xFE,0x7A,0xE1,0x03,0xFD }; // 徣棯 //////////////////////////////////////////////////////////////////////////////// // 妱崬傒張棟傪偙偙傊婰弎偡傞丅 // CI-V偼丄9600bps偱11Byte庴庢傞偺偵栺11.5mS偐偐傞偨傔丄妱崬傒傪巊梡丅 //////////////////////////////////////////////////////////////////////////////// void interrupt() { if(PIR1.RCIF){ if (UART1_Data_Ready() == 1) { // If data is received, uart_rd = UART1_Read(); // read the received data, switch (civ_count) { case 10: if (uart_rd == 0xFD) civ_count++;丂丂丂// 廃攇悢僨乕僞庢傝崬傒姰椆 else civ_count = 0; break; case 9: if (uart_rd == 0x00){ civ_bcd[3] = 0x00; civ_count++;} else civ_count = 0; break; case 8: civ_bcd[0] = uart_rd; civ_count++; break; case 7: civ_bcd[1] = uart_rd; civ_count++; break; case 6: civ_bcd[2] = uart_rd; civ_count++; break; case 5: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 4: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 3: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 2: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 1: if (uart_rd == 0xFE) civ_count++; else civ_count = 0; break; case 0: if (uart_rd == 0xFE) civ_count++; else civ_count = 0; break; default: break; } } PIR1.RCIF = 0; } } void main(){ // 徣棯 // 埲壓偼while(1) 儖乕僾偺拞偺張棟 // 廃攇悢僨乕僞傪CI-V偐傜庢崬傒丄DDS偺敪怳廃攇悢傊僙僢僩乮幚敪怳偼偣偢乯 if(civ_count == 11) // CI-V to civ_bcd[] { BCD_move(dds_bcd, civ_bcd); BCDtoLcd(2, 8, dds_bcd); civ_count = 0; } // 徣棯 // 張棟僔乕働儞僗偺娭學偱丄愭偵START SW偑棧偝傟偨偐傪妋擣偡傞丅 if((START_b4 != 0) && (SW_start == 1)) { // START SW偑俷俥俥偝傟偨丠 if(AM_sw != 0) PIE1.RCIE = 0; // USART 妱崬傒嬛巭 Freq = BCDtoDec(ant_bcd); Freq2 = BCDtoDec(dds_bcd); Freq_tmp = MOTER_search(Freq, Freq2); if(Freq_tmp == 0) { Lcd_Out(1, 5, "Err"); // 擮偺偨傔Err昞帵 }else { DECtoBcd(Freq_tmp); BCDtoBcd(acc_bcd, ant_bcd); BCDtoLcd(1, 8, ant_bcd); } START_b4 =0; if(AM_sw != 0) PIE1.RCIE = 1; // USART 妱崬傒嫋壜 } if(SW_start == 0){ // START SW偑俷俶偝傟偨丠 if((AM_sw != 0) && (START_b4 == 0)){ UART1_Write_Text(civ_get_str); // CI-V撉崬傒僐儅儞僪傪憲弌偟偰偍偔丅 Delay_ms(20); // 庴怣妱崬傒懸偪偺帪娫丅 } START_b4 = 1; }// 徣棯 }
丂
| 俇丏愒 奜慄儕儌僐儞偱僐儞僩儘乕儖 (2011/02/11丗捛壛) |
摉弶偐傜愒奜慄儕儌僐儞偱憖嶌偱偒傞傛偆偵偲峫偊丄愒奜慄庴岝僙儞僒乕乮廐寧乯傪攝慄偟偰偄傑偟偨偑丄庢傝妡偐傝巒傔偨偺偑CI-V偺 張棟傪廔偊偨侾寧俀侽擔慜屻偐傜偱偟偨丅
嵟弶偼丄CI-V妱崬傒偺婰弎偲摨帪偵愒奜慄偺怣崋桳傝傪妱傝崬傒偱専弌偟丄偦偺妱崬傒忬懺傪尒偰僗僞乕僩SW偲摨偠摦嶌乮ANT偺儌乕 僞乕傪庴怣廃攇悢偵崌傢偣傞乯傪偝偣偰條巕傪尒偰偄傑偟偨丅
偲偙傠偑丄晹壆偺寀岝摂傪揰摂偡傞偲丄岆専弌偟偰偄傞偺偑妋擣偱偒傑偟偨偺偱丄杮奿揑偵庢傝慻傓偙偲偵偟傑偟偨丅嵦梡偟偨敪岝懁偼丄庤尦偵揮偑偭偰偄偨嬻婥惔忩婍偺儕儌僐儞偱丄杮懱偼偡偱偵張暘偟偰偍傝丄儃僞儞偑彮側偄偺偑寛傔庤偵側傝傑偟偨丅
偙傟偵寛傔傞慜偼丄儂乕儉僙儞僞乕偵攧偭偰偄傞斈梡偺儕儌僐儞傪峫偊偰偄傑偟偨偑丄嵞棙梡偱妶梡偡傞偙偲偵偟傑偟偨丅
丂
仭怣崋夝愅
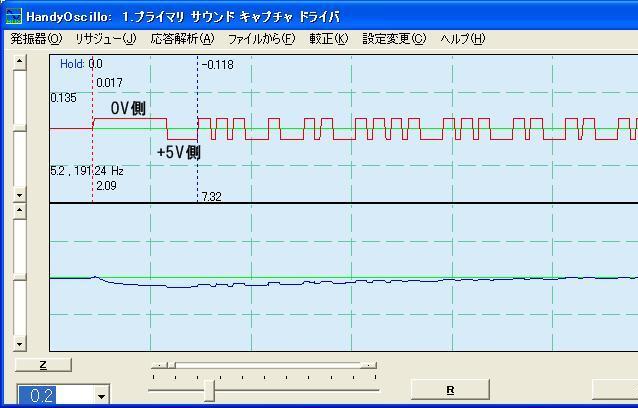
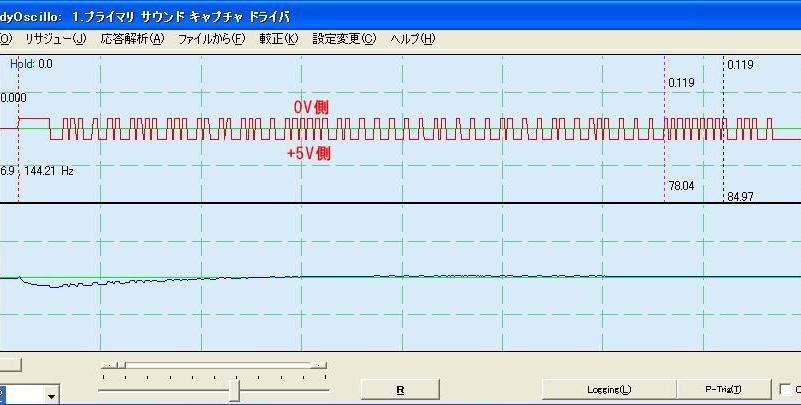
嵟弶偼丄傎偲傫偳偺愒奜慄儕儌僐儞偼NEC僼僅乕儅僢僩偐偲巚偄丄幚怣崋傪尒偢偵巇條偺捠傝僾儘僌儔儈儞僌偟偨偲偙傠丄慡慠斀墳偣偢埲 慜巊偭偨僼儕乕僜僼僩偺 HandyOscillo 偵悽榖偵側傝傑偟偨丅
偙偺儕儌僐儞偼丄埲壓偺亙怣崋侾亜偐傜僗僞乕僩怣崋偑俆倣S慜屻偁傞偙偲偑暘偐傝傑偡丅傑偨丄恾偺怣崋偼忋壓偑媡揮偟偰偄傞偺偱丄夋柺 忋偺忋偑侽V懁偲偟偰傒偰偔偩偝偄丅
亙怣崋侾亜
丂
師偵丄侽侾怣崋偱偡偑丄傑偢乽侾乿偼丄1.8mS掱搙偁傝傑偡丅
亙怣崋俀亜
丂
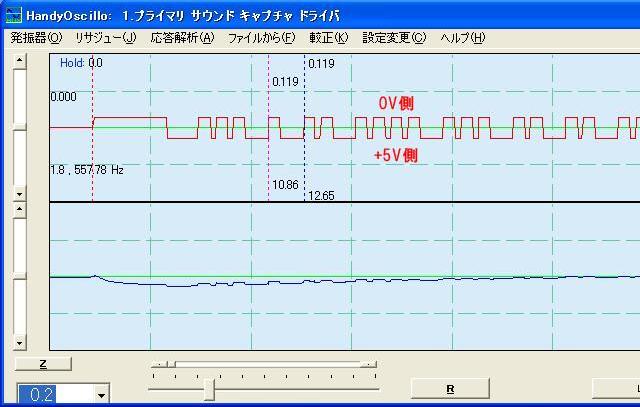
峏偵乽侽乿偱偡偑丄怣崋偺嵟屻偺偁偨傝偵侽忬懺偑俉價僢僩楢懕偟偰偄傞偲偙傠偐傜妱傝弌偡偲丄 0.9倣S掱搙偲妋擣偱偒傑偡丅
亙怣崋俁亜
丂
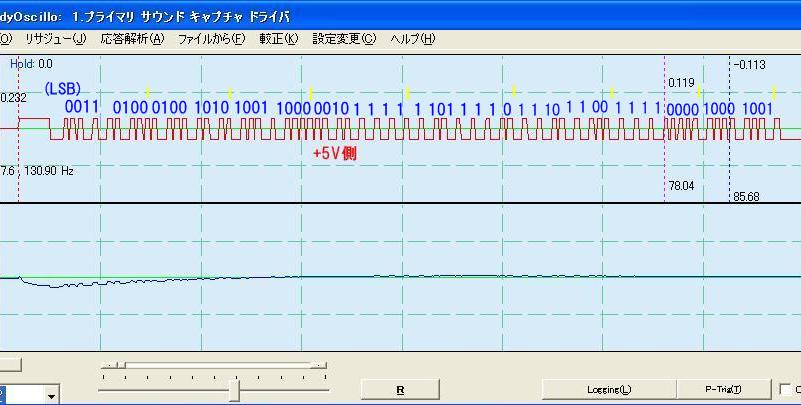
傕偆堦偮偺怣崋傪尒傞偲丄埲壓偺傛偆偵嵟屻偺侾僶僀僩偁偨傝偵堘偄偑弌偰偄傑偡丅
亙怣崋係亜
丂
偙偺愒奜慄儕儌僐儞偺怣崋偼俉僶僀僩偵側傝丄亙怣崋係亜偼愭摢偐傜乮LSB憲弌乯 乽 0x2c,0x52,0x19,0xf4,0x7b,0x37,0x0f,0x91乿 偲側傝傑偡丅亙怣崋俁亜偺恾偼丄嵟廔僶僀僩偑 0x90 偱偡偺偱丄偦傟偧傟係偮偺儃僞儞偵 0x90 乣 0x93 偑妱傝摉偰傜傟偰偄傞偙偲偑暘偐傝丄傗偭偲儃僞儞暿偵婡擻傪妱傝摉偰傞偙偲偑偱偒傑偟偨丅
丂
僾儘僌儔儉偺曽偵側傝傑偡偑丄慡懱偺僜乕僗偼侾俇侽侽儔僀儞傎偳偵側傝傑偟偨偟丄僐儞僷僀儖屻偺僐乕僪傕係俇亾掱搙巊梡偟偰偄傞忬懺偱 偡偺偱丄愒奜慄張棟偺娭楢晹暘偺傒傪嶲峫偵彂偒弌偟偰偍偒傑偡丅
妱崬傒張棟偱偼丄僞僀儅乕妱傝崬傒偱 0.1mS 傪僇僂儞僩乮 t0_count 乯偟偰偄傑偡丅偙偺 0.1mS 偺僇僂儞僩偱丄僗僞乕僩怣崋偺俆倣倱偲丄僨乕僞晹偵偮偄偰偼侾丏俀倣俽傛傝挿抁偐偱侽侾傪敾掕偟偰偄傑偡丅RB0/INT丂妱崬傒偑桳傞偲丄愒奜慄偺忬懺乮IN_red乯傪俇俆僇僂儞僩乮僗僞乕僩亄俇係價僢僩乯偟丄娙扨側僄儔乕張棟傪偟偰慡晹偦傠偭偨傜 IR_flag 傪侾偵偟偰偄傑偡丅
傑偨丄儊僀儞儖乕僾偱偺僠僃僢僋偼丄娙堈揑偵俉僶僀僩栚偺徠崌偩偗偱峴偭偰偄傑偡丅儊僀儞儖乕僾偺張棟庤弴偵偮偄偰偱偡偑丄CI-V偺怣崋庢傝崬傒帪娫妋曐偺偨傔丄偁偊偰 IR_flag 偑侾偺忬懺傪屻偱妋擣偟偰丄儌乕僞乕僗僞乕僩偺張棟偼堦廃偟偨師夞偺儖乕僾偱妋擣偡傞傛偆偵偟偰偄傑偡丅偨偩偟丄僷儚乕俷俥俥偼丄捈屻偺僞僀儈儞僌偱張棟 偟偰偄傑偡丅
// INFRA_red 娭楢偺掕媊//////////////////////////////////////////// // 徏壓揹岺惢偺屆偄乮10擭慜乯嬻婥惔忩婡偺儕儌僐儞乮EH3550/EH3560乯 int IN_red; // INFRA_red 愒奜慄億乕僩妱崬傒僼儔僌 char RC_poff[8] = { 0x2c,0x52,0x19,0xf4,0x7b,0x37,0x0f,0x90 }; char RC_start[8] = { 0x2c,0x52,0x19,0xf4,0x7b,0x37,0x0f,0x91 }; int t0_count; // 0.1mS Count Max 25.5mS int IR_flag; char IR_buff[8]; int irx; //徣棯 //////////////////////////////////////////////////////////////////////////////// // 妱崬傒張棟傪偙偙傊婰弎偡傞丅 // CI-V偼丄9600bps偱11Byte庴庢傞偺偵栺11.5mS偐偐傞偨傔丄妱崬傒傪巊梡丅 //////////////////////////////////////////////////////////////////////////////// void interrupt() { if (INTCON.TMR0IF) { t0_count++; TMR0L = 131; // 131 to 256 = 125count(佮0.1mS) INTCON.TMR0IF = 0; } if(PIR1.RCIF){ if (UART1_Data_Ready() == 1) { // If data is received, uart_rd = UART1_Read(); // read the received data, switch (civ_count) { case 10: if (uart_rd == 0xFD) civ_count++; else civ_count = 0; break; case 9: if (uart_rd == 0x00){ civ_bcd[3] = 0x00; civ_count++;} else civ_count = 0; break; case 8: civ_bcd[0] = uart_rd; civ_count++; break; case 7: civ_bcd[1] = uart_rd; civ_count++; break; case 6: civ_bcd[2] = uart_rd; civ_count++; break; case 5: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 4: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 3: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 2: if(uart_rd == 0xfd) civ_count = 0; else civ_count++; break; case 1: if (uart_rd == 0xFE) civ_count++; else civ_count = 0; break; case 0: if (uart_rd == 0xFE) civ_count++; else civ_count = 0; break; default: break; } } PIR1.RCIF = 0; } if(INTCON.INT0IF == 1) { //RB0/INT妱崬傒丂愒奜慄儕儌僐儞 INTCON.INT0IE = 0; //RB0/INT妱崬傒偺嬛巭 switch(IN_red) { case 0: t0_count = 0; IN_red++; TMR0L = 131; // 131 to 256 = 125count(佮0.1mS) INTCON.TMR0IE = 1; //Timer0/INT妱崬傒偺嫋壜 break; case 1: if(xxx == 0) xxx = t0_count; if((t0_count >= 40) && (t0_count <= 62)){ //幚應4.9mS t0_count = 0; IN_red++; }else{ //斖埻傪奜傟偨 IN_red = 0; INTCON.TMR0IE = 0; //Timer0/INT妱崬傒偺嬛巭 } break; case 66: IR_flag = 1; IN_red = 0; SENS_1 = 0; // Debug梡LED揰摂仠 break; default: if((IN_red >= 2) && (IN_red <= 65)) { // 8Byte = 64bit if(t0_count >= 21){ // 2.1mS埲忋側傜柍岠 IN_red = 0; INTCON.TMR0IE = 0; //Timer0/INT妱崬傒偺嬛巭 }else{ irx = (IN_red - 2) / 8; IR_buff[irx] = IR_buff[irx] >> 1; if(t0_count <= 12){ // 1.2mS偑晘嫃抣 IR_buff[irx].B7 = 0; }else{ IR_buff[irx].B7 = 1; } t0_count = 0; IN_red++; } } break; } INTCON.INT0IF = 0; //RB0/INT妱崬傒僼儔僌僋儕傾乕 INTCON.INT0IE = 1; //RB0/INT妱崬傒偺嫋壜 } } void main(){ INTCON2 = 0b00111111; // bit 7: 0 = Port B use pullup. // bit 6:RB0/INT0 = Interrupt on falling edge // 0 = RB0/INT0 僺儞偺棫偪壓偑傝僄僢僕偵傛傝妱傝崬傒 T0CON = 0b01010001; // Timer Controle 亐4 // bit 5:T0CS: TMR0 僋儘僢僋僜乕僗慖戰價僢僩 // 0 = 撪晹柦椷僒僀僋儖僋儘僢僋乮CLKOUT) // bit 3: PSA僾儕僗働乕儔妱傝摉偰 0=TMR0 // bit 2-0:僾儕僗働乕儔儗乕僩 001=4 // 徣棯 // 埲壓偼while(1) 儖乕僾偺拞偺張棟 // 徣棯 if(IR_flag == 2){ // 愒奜慄妱崬傒偑桳偭偨丠 if(AM_sw != 0) PIE1.RCIE = 0; // USART 妱崬傒嬛巭 Freq = BCDtoDec(ant_bcd); Freq2 = BCDtoDec(dds_bcd); Freq_tmp = MOTER_search(Freq, Freq2); if(Freq_tmp == 0) { Lcd_Out(1, 5, "Err"); // 擮偺偨傔Err昞帵 }else { DECtoBcd(Freq_tmp); BCDtoBcd(acc_bcd, ant_bcd); BCDtoLcd(1, 8, ant_bcd); } if(AM_sw != 0) PIE1.RCIE = 1; // USART 妱崬傒嫋壜 IN_red = 0; IR_flag = 0; INTCON.INT0IE = 1; //RB0/INT妱崬傒偺嫋壜 } if(IR_flag == 1){ // 愒奜慄妱崬傒偑桳偭偨丠 if(IR_buff[7] >= RC_start[7]){ if((AM_sw != 0) && (START_b4 == 0)){ UART1_Write_Text(civ_get_str); // CI-V撉崬傒僐儅儞僪傪憲弌偟偰偍偔丅 Delay_ms(20); // 庴怣妱崬傒懸偪偺帪娫丅 } IR_flag = 2; } if(IR_buff[7] == RC_poff[7]){ IR_flag = 9; } if(IR_flag == 1) { IN_red = 0; IR_flag = 0; INTCON.INT0IE = 1; //RB0/INT妱崬傒偺嫋壜 } SENS_1 = 1; } if((OFFSW == 0) || (IR_flag == 9)){ EEPROM_Write(0x00, ant_bcd[0]); EEPROM_Write(0x01, ant_bcd[1]); EEPROM_Write(0x02, ant_bcd[2]); POWER_on = 0; // 偙偙偱揹尮OFF break; // 揹尮傪棊偲偡偨傔娭學側偄偑柧帵揑偵婰弎丅 }// 徣棯 }
丂
2011/02/11:傎傏峔憐捠傝偺摦偒傪偡傞偙偲偑妋擣偱偒傑偟偨丅
傑偨丄弶傔偰PIC偱C尵岅傪巊偄傑偟偨丅忕挿搙偺懡偄僜乕僗傪偩傜偩傜偲婰弎偟傑偟偨偑丄娫堘偄偼僐儞僷僀儔乕偑敪尒偟偰偔傟丄嵟揔壔 張棟傕偟偰偔傟偰偄傞傛偆偱偡丅杮摉偵MikroC 偑柍偗傟偽丄搑拞偱掹傔偰偄偨偲巚偄傑偡偟丄乽傾僙儞僽儔乕偵栠傟偦偆偵柍偄乿偲偄偆偺偑尰嵼偺姶憐偱偡丅
偙偺宖嵹偑壗偐偺嶲峫偵側傟偽岾偄偱偡丅栤偄崌傢偣庴晅偼廔椆偟傑偟偨丅乮20110718乯
丂
| 俋俋丏捛婰梡乮梊旛乯 |
丂